由于匹配移动算法并非总是精确的,并且非常容易导致现场测量错误或特征点跟踪错误,并且由于对每个帧的匹配是独立计算的,因此结果可能会较“嘈杂”,特别是估计视野时。在真实摄影机执行平滑移动的匹配移动情况下,过滤匹配结果以消除噪波可能非常有用。
-
 “实用程序”面板 > “实用程序”卷展栏 > “更多”按钮 > “实用程序”对话框 > “摄影机跟踪器” > “移动平滑”卷展栏
“实用程序”面板 > “实用程序”卷展栏 > “更多”按钮 > “实用程序”对话框 > “摄影机跟踪器” > “移动平滑”卷展栏
在创建匹配后,使用“平滑移动”卷展栏来控制和执行这些平滑操作。
界面
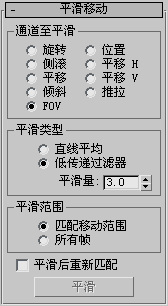
“通道至平滑”组
可以选择要平滑的参数或参数集。可以选择一次平滑整个旋转或所有“位置”轨迹,也可以平滑单参数或轴。
- 旋转平移、倾斜和测滚。
- 位置推拉、水平平移和垂直平移。
- FOV摄影机 FOV(视野)。
- 平移绕摄影机的局部 Z 轴旋转。
- 倾斜绕摄影机的局部 X 轴旋转。
- 侧滚绕摄影机的局部 Y 轴旋转。
- 推拉沿摄影机的局部 Y 轴移动。
- 水平平移沿摄影机的局部 X 轴移动。
- 垂直平移沿摄影机的局部 Z 轴移动。
“平滑类型”组
- 直线平均值导致“移动平滑”为每个选定的参数生成一个直线平均值。如果知道某个参数是固定的,但不知道其实际值时,使用此选项非常有用。示例包括视野或垂直位置。使用摄影机匹配器可以初步估计该参数,然后构建一个适合的直线平均值,然后重新匹配其余参数。
-
低通过滤器
导致“移动平滑”将一个低传递过滤器应用于所选参数,以消除高频噪波。
- 平滑量
- 使用高斯低通过滤器(其宽度和变化由平滑度微调器控制)实现平滑。增加该值可以增加平滑。
“平滑范围”组
控制将对其执行平滑的帧范围。
- 匹配移动范围将平滑应用于“匹配移动”卷展栏中指定的动画帧范围。这将允许将一个匹配移动作业分解为若干帧范围。使用此按钮可以孤立和测试某个难处理的帧范围,而不干扰其他令人满意的帧。
- 所有帧将平滑应用于所选参数中的所有关键帧。
- 平滑后重新匹配
- 控制过滤后是否执行补偿匹配移动。如果启用此按钮,将在“匹配”卷展栏中禁用已平滑的参数,并执行另一个匹配移动。建议再次执行此重新匹配,因为它可以调整其他摄像机参数以补偿平滑,并且对于未平滑的参数,估计的结果通常更为平滑。
- 平滑
- 基于平滑类型、范围和数量设置执行移动平滑。如果禁用此按钮,将不会指定当前的匹配摄像机。