La estrategia Pieza se utiliza para cortar la pieza de la barra. También se conoce como operación de corte.

|
Acceso: |
Cinta de opciones:
ficha CAM  panel Torneado
Pieza
panel Torneado
Pieza

|
 Parámetros de la ficha Herramienta
Parámetros de la ficha Herramienta
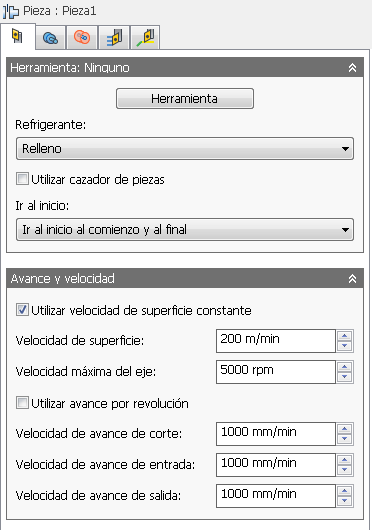
Herramienta
Seleccione una herramienta de acanalado o partición (corte) de la biblioteca o cree una nueva herramienta de partición.
Refrigerante
Seleccione el tipo de refrigerante que se va a utilizar con la herramienta. Las opciones de salida varían según las funciones de la máquina y la configuración del posprocesador de la máquina.
Uso del cazador de piezas
Active esta opción para activar el cazador de piezas. Solo está disponible si la máquina está equipada con un cazador de piezas y el posprocesador está escrito de modo que admita dicho elemento.
Ir al inicio
La posición de inicio es un punto de retracción en Z, en relación con el sistema de coordenadas de trabajo (SCT) que se ha definido. SCT se define en el cuadro de diálogo Configuración de la ficha Configuración.
Puede forzar la herramienta a desplazarse a la posición de inicio antes de iniciar la operación o una vez que la operación haya terminado. La herramienta siempre saldrá del material en el eje X hasta alcanzar la altura del espacio libre. Luego se desplazará a la posición de inicio en el eje Z. Si utiliza la misma herramienta para diversas operaciones seguidas, puede utilizar estas opciones para reducir los movimientos innecesarios e impedir que la herramienta regrese a la posición de inicio.
| No ir al inicio
La herramienta comenzará a la altura del espacio libre por encima de la primera posición de corte. Cuando termine, la herramienta permanecerá sobre el último movimiento, a la altura del espacio libre. |
 |
| Ir al inicio en el principio
La herramienta comenzará en la intersección de la altura del espacio libre y la posición de inicio. Cuando termine, la herramienta permanecerá sobre el último movimiento, a la altura del espacio libre. |
 |
| Ir al inicio en el final
La herramienta comenzará a la altura del espacio libre por encima de la primera posición de corte. Cuando termine, la herramienta regresará a la intersección de la altura del espacio libre y la posición de inicio. |
 |
| Ir al inicio en el principio y en el final
La herramienta comenzará y terminará en la intersección de la altura del espacio libre y la posición de inicio. |
 |
Utilizar velocidad de superficie constante
Active esta opción para ajustar automáticamente la velocidad del eje y mantener una velocidad de superficie constante entre la herramienta y la pieza de trabajo, a medida que el diámetro de corte cambia. Velocidad de superficie constante (CSS) se especifica mediante G96 en la mayoría de los equipos.
Velocidad de superficie
Velocidad de corte expresada como la velocidad de la herramienta en la superficie de la pieza. Se expresa en pies/min o m/min según la configuración de Unidades.
Velocidad del eje
Velocidad de rotación del eje.
Velocidad máxima del eje
Especifica la velocidad máxima permitida del eje cuando se utiliza la velocidad de superficie constante (CSS).
Utilizar avance por revolución
Active esta opción para cambiar de Distancia a lo largo del tiempo (in/min o mm/min) a Avance por revolución (IPR o MMPR). Este tipo de velocidad de avance crea una carga de viruta constante, independientemente de las revoluciones por minuto del eje.
Velocidad de avance de corte
Avance utilizado en los movimientos de corte. Entrada según el parámetro Utilizar avance por revolución y las Unidades actuales.
Velocidad de avance de entrada
Avance utilizado para la entrada en un movimiento de corte. Entrada según el parámetro Utilizar avance por revolución y las Unidades actuales.
Velocidad de avance de salida
Avance utilizado para la salida de un movimiento de corte. Entrada según el parámetro Utilizar avance por revolución y las Unidades actuales.
 Parámetros de la ficha Geometría
Parámetros de la ficha Geometría
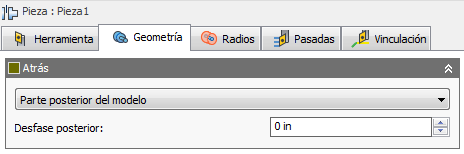
Confinamiento posterior
Se utiliza para limitar la ruta de herramienta al confinar un área. Las rutas de herramienta pueden estar contenidas dentro de una región específica. El modo posterior permite establecer el punto de referencia para definir el área de contención, y el desfase permite ajustar el contorno positivo o negativo de dicha referencia. Puede utilizar estas opciones para extender la ruta de herramienta más allá del modelo para un corte más largo.
Modo posterior
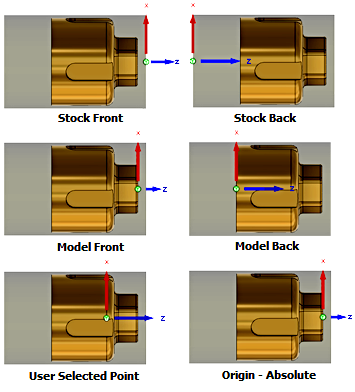
Especifica la posición de referencia de los contornos de confinamiento de la parte trasera. Estas son las opciones de selección de la referencia.
- Parte frontal del material: permite establecer la referencia con respecto a la parte frontal del material.
- Parte posterior del material: permite establecer la referencia con respecto a la parte posterior del material.
- Parte frontal del portabrocas: permite establecer la referencia con respecto a la cara del portabrocas.
- Parte delantera del modelo: permite establecer la referencia con respecto a la parte delantera del modelo.
- Parte trasera del modelo: permite establecer la referencia con respecto a la parte trasera del modelo.
- Punto seleccionado: seleccione un vértice o una arista para la referencia de origen.
- Origen: permite establecer la referencia con respecto a la posición cero de la pieza.
Parte delantera del portabrocas
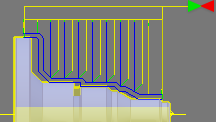
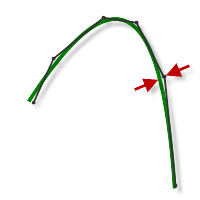
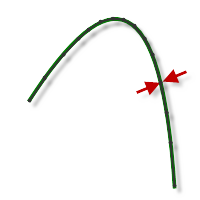
Desfase
Especifica la distancia para extender el contorno de mecanizado desde la posición de referencia que se muestra arriba. Puede especificar una distancia positiva o negativa desde el punto de referencia, o bien arrastrar dinámicamente la posición con el ratón. El contorno posterior se muestra en color verde.
Desfase de material de la cara posterior
Especifica la distancia de mecanizado más allá de la cara posterior del modelo.
| Desfase de la cara posterior negativo
Finaliza la ruta de herramienta más adentro del área de corte. |
 |
| Desfase de la cara posterior positivo
Finaliza la ruta de herramienta más lejos del área de corte. |
 |
 Parámetros de la ficha Radios
Parámetros de la ficha Radios

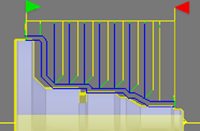
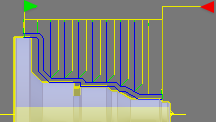
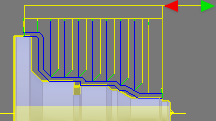
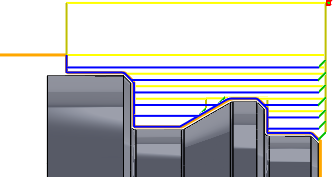
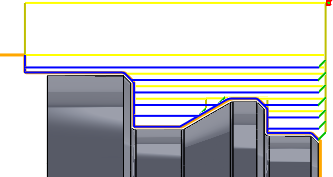
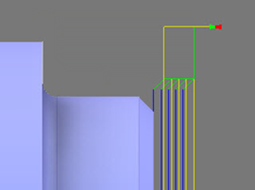
La ficha Radios permite establecer un área de contención radial para el mecanizado. Estos parámetros siguen un código de color para facilitar su identificación.
|
Orden para la contención de radios. |
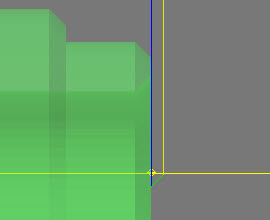
Espacio libre
Esta opción se muestra en color naranja y controla el radio adonde la herramienta se mueve rápidamente al principio y al final de la ruta de herramienta. La herramienta se aproxima desde esta posición y se retrae a esta posición.
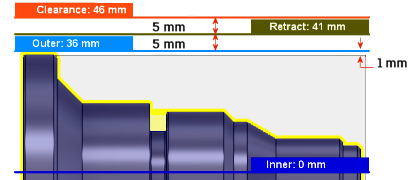
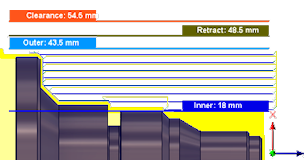
"De" se muestra en color naranja y establece la posición de referencia del radio de espacio libre. La referencia puede ser respecto al material, el modelo, un radio o diámetro especificado, o cualquiera de las otras posiciones radiales. Esta posición de referencia se puede desplazar con un valor de desfase positivo o negativo.
- Retracción: establece el radio de espacio libre con respecto a la posición de retracción.
- DE del material: establece el radio de espacio libre con respecto al diámetro exterior del material definido.
- DE del modelo: establece el radio de espacio libre con respecto al diámetro exterior del modelo definido.
- Radio exterior: establece el radio de espacio libre con respecto a la posición de radio exterior. El radio de espacio libre debe ser superior al radio exterior. Utilice el parámetro Desfase para realizar los ajustes necesarios.
- Radio interior: establece el radio de espacio libre con respecto a la posición de radio interior. El radio de espacio libre debe ser mayor que el radio interior. Utilice el parámetro Desfase para realizar los ajustes necesarios.
- DI de modelo: establece el radio de espacio libre con respecto al diámetro interior del modelo, según se ha definido en la Configuración. Utilice el parámetro Desfase para realizar los ajustes necesarios.
- DI del material: establece el radio de espacio libre con respecto al diámetro interior del material, según se ha definido en la Configuración. Utilice el parámetro Desfase para realizar los ajustes necesarios.
- Selección: seleccione cualquier cara, vértice o punto en el modelo para definir el radio de espacio libre. Utilice el parámetro Desfase para realizar ajustes positivos o negativos según sea necesario.
- Radio: esta opción permite especificar un valor de radio en el campo Desfase. Este valor se expresa con respecto a la línea de centro de la pieza y no reconoce ningún cambio asociativo realizado en el modelo.
- Diámetro: esta opción permite especificar un valor de diámetro en el campo Desfase. Este valor se expresa con respecto a la línea de centro de la pieza y no reconoce ningún cambio asociativo realizado en el modelo.
Desfase
Utilice este desfase para desplazar la posición en relación con el punto de referencia seleccionado arriba. Puede realizar ajustes positivos o negativos, según sea necesario.
|
|
En este ejemplo... |
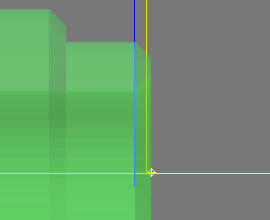
Retracción
Se muestra en verde oscuro y controla la posición encima de la superficie que se va a mecanizar. Es el radio adonde la herramienta se retrae entre los cortes.
"De" se muestra en verde oscuro y establece la posición de referencia de retracción. La referencia puede ser respecto al material, el modelo, un radio o diámetro especificado, o cualquiera de las otras posiciones radiales. Esta posición de referencia se puede desplazar con un valor de desfase positivo o negativo.
- Espacio libre: establece el radio de retracción con respecto a la posición de espacio libre.
- DE del material: establece el radio de espacio libre con respecto al diámetro exterior del material definido.
- DE del modelo: establece el radio de espacio libre con respecto al diámetro exterior del modelo definido.
- Radio exterior: establece el radio de espacio libre con respecto a la posición de radio exterior. El radio de espacio libre debe ser superior al radio exterior. Utilice el parámetro Desfase para realizar los ajustes necesarios.
- Radio interior: establece el radio de espacio libre con respecto a la posición de radio interior. El radio de espacio libre debe ser mayor que el radio interior. Utilice el parámetro Desfase para realizar los ajustes necesarios.
- DI de modelo: establece el radio de espacio libre con respecto al diámetro interior del modelo, según se ha definido en la Configuración. Utilice el parámetro Desfase para realizar los ajustes necesarios.
- DI del material: establece el radio de espacio libre con respecto al diámetro interior del material, según se ha definido en la Configuración. Utilice el parámetro Desfase para realizar los ajustes necesarios.
- Selección: seleccione cualquier cara, vértice o punto en el modelo para definir el radio de espacio libre. Utilice el parámetro Desfase para realizar ajustes positivos o negativos según sea necesario.
- Radio: esta opción permite especificar un valor de radio en el campo Desfase. Este valor se expresa con respecto a la línea de centro de la pieza y no reconoce ningún cambio asociativo realizado en el modelo.
- Diámetro: esta opción permite especificar un valor de diámetro en el campo Desfase. Este valor se expresa con respecto a la línea de centro de la pieza y no reconoce ningún cambio asociativo realizado en el modelo.
Desfase
Misma función que el desfase de espacio libre que se muestra arriba.
Radio exterior
Se muestra en color celeste y define el mayor contorno radial del área de corte. El radio exterior define la superficie del material exterior que se va a mecanizar.
|
|
Radio exterior en celeste. |
"De" se muestra en color celeste y establece la posición de referencia del radio exterior. La referencia puede ser respecto al material, el modelo, un radio o diámetro especificado, o cualquiera de las otras posiciones radiales. Esta posición de referencia se puede desplazar con un valor de desfase positivo o negativo.
- Espacio libre: establece el radio de retracción con respecto a la posición de espacio libre.
- Retracción: establece el radio de espacio libre con respecto a la posición de retracción.
- DE del material: establece el radio de espacio libre con respecto al diámetro exterior del material definido.
- DE del modelo: establece el radio de espacio libre con respecto al diámetro exterior del modelo definido.
- Radio interior: establece el radio de espacio libre con respecto a la posición de radio interior. El radio de espacio libre debe ser mayor que el radio interior. Utilice el parámetro Desfase para realizar los ajustes necesarios.
- DI de modelo: establece el radio de espacio libre con respecto al diámetro interior del modelo, según se ha definido en la Configuración. Utilice el parámetro Desfase para realizar los ajustes necesarios.
- DI del material: establece el radio de espacio libre con respecto al diámetro interior del material, según se ha definido en la Configuración. Utilice el parámetro Desfase para realizar los ajustes necesarios.
- Selección: seleccione cualquier cara, vértice o punto en el modelo para definir el radio de espacio libre. Utilice el parámetro Desfase para realizar ajustes positivos o negativos según sea necesario.
- Radio: esta opción permite especificar un valor de radio en el campo Desfase. Este valor se expresa con respecto a la línea de centro de la pieza y no reconoce ningún cambio asociativo realizado en el modelo.
- Diámetro: esta opción permite especificar un valor de diámetro en el campo Desfase. Este valor se expresa con respecto a la línea de centro de la pieza y no reconoce ningún cambio asociativo realizado en el modelo.
Desfase
Misma función que el desfase de espacio libre que se muestra arriba.
Radio interior
Se muestra en color azul oscuro y define el menor contorno radial del área de corte. El radio interior controla la profundidad máxima para el área de corte.
|
|
|
Radio interior de color azul oscuro. |
"De" se muestra en color azul oscuro y establece la posición de referencia del radio interior. La referencia puede ser respecto al material, el modelo, un radio o diámetro especificado, o cualquiera de las otras posiciones radiales. Esta posición de referencia se puede desplazar con un valor de desfase positivo o negativo.
Igual que las opciones "De" de radio exterior que se muestran arriba.
Desfase
Misma función que el desfase de espacio libre que se muestra arriba.
 Parámetros de la ficha Pasadas
Parámetros de la ficha Pasadas
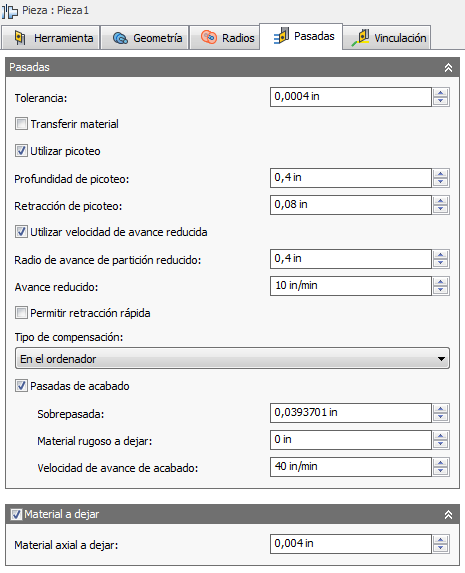
Tolerancia
Esta tolerancia (también conocida como tolerancia de corte) se emplea en la generación de rutas de herramienta y la triangulación geométrica. Las tolerancias de filtrado adicionales, como suavizado, se deben añadir a esta tolerancia para obtener la tolerancia total para el corte.
 |
 |
|
Tolerancia libre 0,100 |
Tolerancia reducida 0,001 |
Los comandos G1 line y G2 G3 arc controlan el movimiento de máquina CNC. Para que esto sea posible, Autodesk HSM transforma las rutas de herramienta de spline y superficie en numerosos segmentos lineales cortos que resultan en una aproximación de la forma deseada. La precisión con que la ruta de herramienta se ajusta a la forma deseada depende en gran medida del número de líneas utilizado. El uso de más líneas proporciona una ruta de herramienta más aproximada a la forma nominal de la spline o superficie.
Insuficiencia de datos
Una tolerancia más ajustada genera una ruta de herramienta más precisa, con segmentos de línea más pequeños. Aunque sea tentador usar tolerancias muy ajustadas, esta estrategia tiene contraprestaciones tales como tiempos de cálculo de ruta de herramienta más prolongados, archivos de código G de gran tamaño y movimientos lineales muy cortos. Estas contraprestaciones pueden suponer un problema, en función de la situación. Autodesk HSM realiza sus cálculos a gran velocidad en casi cualquier equipo. Sin embargo, si dispone de un control NC antiguo con memoria limitada y una máquina con unidades de eje más lentas, el movimiento de la ruta de herramienta puede parecer irregular. Es un fenómeno conocido como insuficiencia de datos. Esta tolerancia, junto con el suavizado, puede reducir el tamaño del programa y mejorar el rendimiento de sus máquinas.
La insuficiencia de datos se produce cuando el control se satura con datos que no puede mantener. Los controles de CNC solo pueden procesar un número finito de líneas de código (bloques) por segundo. Esta cantidad puede ir desde solo 40 bloques/segundo en máquinas antiguas a 1000 bloques/segundo o más en máquinas más modernas. Los movimientos de línea cortos y las velocidades de avance altas pueden forzar una velocidad de procesamiento superior a la que el control puede gestionar. Si esto sucede, la máquina debe detenerse después de cada movimiento y esperar al siguiente servomando desde el control.
Transferir material
Especifica que el material debe sujetarse para su uso en el otro eje.
Utilizar picoteo
El picoteo permite a la herramienta realizar varios pasos, a medida que corta hasta la profundidad completa. Esto reduce la carga de la herramienta y el calor generado por el corte continuo. También puede partir la viruta que se desprende de la pieza.
Profundidad de picoteo
Especifica la cantidad para cortar por profundidad de picoteo.
Retracción de picoteo
Especifica la distancia de retracción entre picoteos.
Utilizar velocidad de avance reducida
Active esta opción para reducir el avance al realizar la partición.
Radio de alimentación de partición reducido
El radio al que se debe reducir la velocidad de avance al realizar la partición.
Permitir retracción rápida
Active esta opción para forzar la retracción a moverse a la velocidad rápida en lugar de la velocidad de avance.
Tipo de compensación
Especifica el tipo de compensación.
- En el ordenador: Autodesk HSM calcula la posición de la ruta de herramienta en función del diámetro de la herramienta. La salida posprocesada contiene la posición de línea de centro real correspondiente a la herramienta que se mueve alrededor de la arista seleccionada de la pieza.
- En el control: no se calcula la posición de la ruta de herramienta; en cambio, se genera la salida de las coordenadas reales de la arista de la pieza. Se genera la salida de los códigos de compensación del cortador (G41/G42) en el programa NC. Esto permite al operador introducir el diámetro completo de la herramienta, en la tabla de desfase de Comp. hta de los controles, para compensar la posición del cortador en el control de la herramienta de mecanizado.
- Desgaste: funciona como si estuviera seleccionada la opción En el ordenador, pero también genera el código Comp. hta izquierda. Esto permite al operador de la herramienta de mecanizado realizar los ajustes correspondientes para desgaste de herramienta en la máquina. introduciendo la diferencia en el tamaño de la herramienta entre lo programado y la herramienta que se utiliza en realidad.
- Desgaste inverso: es idéntica a la opción Desgaste, excepto en que se genera la salida del código Comp. hta derecha.
Pasadas de acabado
Active esta opción para realizar una pasada de acabado antes de cortar la pieza.
Sobrepasada
La distancia para la pasada de acabado.
Material de desbaste a dejar
El corte de desbaste realizará un desplazamiento radial y dejará esta cantidad de material. La herramienta se retraerá, avanzará para el corte de acabado final y, a continuación, avanzará la profundidad de corte final.
Velocidad de avance de acabado
Velocidad de avance de corte para el corte de acabado final.
Material a dejar
| Material a dejar positivo
Cantidad de material que queda una vez finalizada la operación. Puede eliminarse mediante operaciones de desbaste o acabado posteriores. Es habitual dejar una pequeña cantidad de material tras una operación de desbaste. |
 |
| Ningún material a dejar
Elimine todo el material sobrante hasta la geometría seleccionada. |
 |
| Material a dejar negativo
Elimina el material que supera la superficie o el contorno de la pieza. |
 |
Material axial a dejar (cara)
El parámetro Material axial a dejar controla la cantidad de material a dejar en la dirección axial (a lo largo del eje Z), es decir, en las caras de las pestañas. La especificación de un valor de material axial a dejar positivo provoca que quede material en las caras y las áreas superficiales de la dirección Z.

Material axial a dejar
Material a dejar negativo
 Parámetros de la ficha Vinculación
Parámetros de la ficha Vinculación
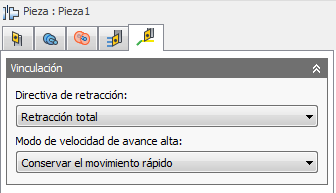
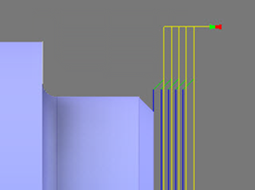
Directiva de retracción
Controla cómo debería la herramienta retraerse hasta el diámetro de espacio libre después de cada pasada de corte. o simplemente retraerse una distancia corta desde la tarea. La distancia se determina por el valor Distancia de seguridad.
 |
 |
| Retracción total: retrae completamente la herramienta hasta la altura de retracción al final de la pasada y antes de situarse sobre el inicio de la pasada siguiente. | Retracción mínima: se desplaza recto hacia arriba hasta la altura inferior donde la herramienta limpia la pieza de trabajo, más la distancia de seguridad especificada. |
Modo de velocidad de avance alta
Especifica cuando los movimientos rápidos deben generarse como rápidos verdaderos (G0) y cuando deben generarse como movimientos de velocidad de avance alta (G1).
- Conservar el movimiento rápido: todos los movimientos rápidos se conservan.
- Conservar el movimiento rápido axial y radial: los movimientos rápidos que se desplazan solo horizontalmente (radiales) o verticalmente (axiales) se generan como rápidos verdaderos.
- Conservar el movimiento rápido axial: solo los movimientos rápidos que se desplazan verticalmente.
- Conservar el movimiento rápido radial: solo los movimientos rápidos que se desplazan horizontalmente.
- Conservar el movimiento rápido axial simple: solo los movimientos rápidos que se desplazan en un eje (X, Y o Z).
- Utilizar siempre un avance alto: los movimientos rápidos (movimientos de avance alto) se generan como movimientos G01 en lugar de como movimientos rápidos (G0).
Normalmente, este parámetro está definido para evitar colisiones en movimientos rápidos en las máquinas que realizan movimientos de "pata de perro" a una velocidad alta.
Velocidad de avance alta
Velocidad de avance de los movimientos rápidos que se generan como G1 en lugar de G0.