La funzione rot restituisce il punto ottenuto dalla rotazione di un punto intorno ad un asse.
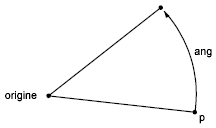
- rot(p,origine,ang)
-
Ruota il punto p in base all'angolo ang intorno all'asse Z passante per il punto origine, come illustrato nell'esempio riportato di seguito.
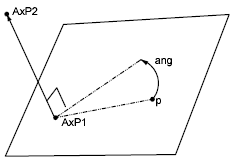
- rot(p,AxP1,AxP2,ang)
-
Ruota il punto p in base all'angolo ang intorno all'asse passante per i punti AxP1 e AxP2, come illustrato nell'esempio riportato di seguito. L'asse è orientato dal primo punto al secondo punto.