È possibile includere nel file .mtd dei componenti statici, ad esempio una pinza utensile, perché siano inclusi nel controllo collisioni.
Quando si include un componente statico nel controllo collisioni, PowerMill riconosce che il componente non effettua alcun movimento lungo gli assi e verifica esclusivamente le possibili collisioni con i componenti dell'asse (componenti mobili di una macchina utensile, incluso il tavolo rotativo) e non con altri componenti statici.
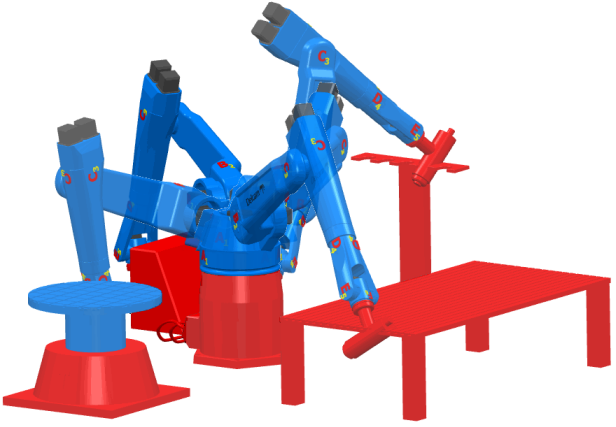
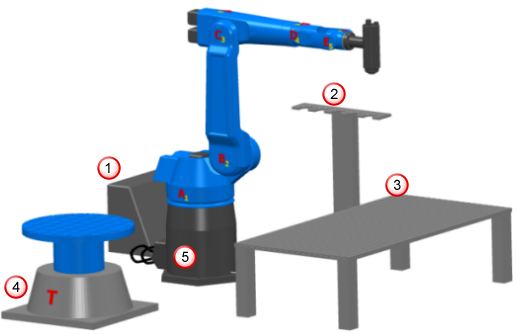
Questo esempio mostra come aggiungere i seguenti componenti in modo che siano inclusi nel controllo collisioni:
- Controllo del Robot

- Pinza Utensile

- Tabella

- Base del tavolo rotativo

- Base del robot

È necessario specificare un attributo NOME per ogni componente statico, dato che PowerMill sottopone al controllo collisioni soltanto i componenti dotati di un attributo NOME.
- Aprire il file Robot_cell.mtd in un editor XML. Nell'esempio viene utilizzato NotePad++.
All'interno del file .mdt, i componenti statici sono definiti nelle rispettive sezioni (note come elementi principali in linguaggio XML). Ogni componente statico è identificato da un commento, ad esempio: <!-- Il controller è statico -->, seguito dall'elemento secondario <machine_part>.
- Modificare l'elemento <machine_part> associato al controller inserendo l'attributo NAME="RobotCellController". In tal modo, l'elemento diverrà: <machine_part NAME="RobotCellController">.
- Modificare l'elemento <machine_part> associato alla pinza utensile inserendo l'attributo NAME="RobotCellTool". In tal modo, l'elemento diverrà: <machine_part NAME="RobotCellTool">.
- Modificare l'elemento <machine_part> associato al tavolo inserendo l'attributo NAME="RobotCellTable". In tal modo, l'elemento diverrà: <machine_part NAME="RobotCellTable">.
- Modificare l'elemento <machine_part> associato alla base del tavolo rotativo inserendo l'attributo NAME="RotaryTableBase". In tal modo, l'elemento diverrà: <machine_part NAME="RotaryTableBase">.
- Modificare l'elemento <machine_part> associato alla base del robot inserendo l'attributo NAME="RobotBase". In tal modo, l'elemento diverrà: <machine_part NAME="RobotBase">.
- Salvare il file .mtd.
Ogni componente statico è ora sottoposto al controllo collisioni.