Каждый станок может быть описан по его математической модели, которая называется Кинематическая модель станка. Эта модель содержит информацию, используемую утилитой Autodesk Manufacturing Post Processor Utility для преобразования координат, полученных из файла CLDATA(координаты модели), в координаты станка (координаты станка). Это преобразование называется Обратная кинематическая задача.
Решение этой проблемы - это одна из основных задач постпроцессора. Она заметно усложняется при обработке многоосевых траекторий. Чтобы представить кинематику станка, Autodesk Manufacturing Post Processor Utility использует формат данных станка, также называемый MTD-форматом. Кинематика станка, представленная в этом формате, называется MTD-модель. Представление кинематики станка, основанное на MTD, намного эффективнее, чем представление кинематики по 3-осевым, 4-осевым и 5-осевым классам. Также оно позволяет создавать программы любой конфигурации, включая программы для 6-осевых станков с тремя поворотными осями.
Геометрия станка может быть задана либо с помощью файла триангуляции DMT, определенного в системе САПР, либо с помощью параметрических примитивов (параллелепипедов и конусов).
При создании собственной MTD-модели желательно начать с уже существующей MTD-модели и просто отредактировать ее.
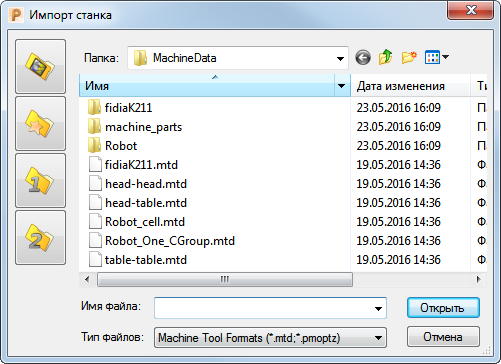
При выборе вкладки «Станок» > панель «Файл» > «Импорт» отображаются все существующие MTD-файлы:
Подробные сведения о том, как улучшить проверку столкновений, см. в разделе Редактирование MTD-файла для проверки столкновений.