Этот пример показывает, как использовать функции динамического контроля станка для предотвращения столкновений между станком и обрабатываемой деталью.
В этом примере используется проект DynamicMachineControl_Example из папки Examples.
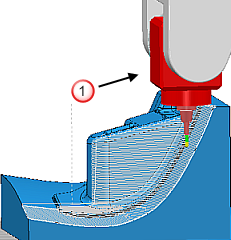
- В Проводнике в ветви Траектории щелкните правой кнопкой мыши по траектории и выберите Симуляция с начала.
Так как станок выполняет обработку вниз к поверхностям детали, шпиндель и компонент оси А станка сталкиваются с обрабатываемой деталью.
- Выберите вкладку «Правка траектории» > панель «Правка» > «Динамический контроль станка», чтобы открыть вкладку Динамический контроль станка.
- Выберите вкладку «Динамический контроль станка» > панель «Параметры» > «Положение станка», чтобы открыть диалоговое окно Положение станка.
В этом диалоговом окне отображается положение каждой оси станка. Отображение этого диалога полезно, так как позволяет видеть перемещение осей, а особенно, если вы перемещаете ось за пределы её ограничений.
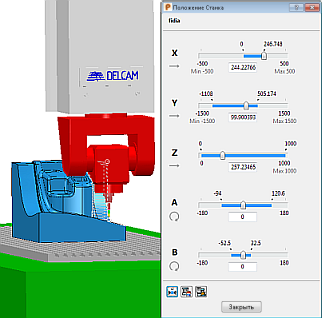
- Задайте значения шагов поворотных осей реального станка. Это гарантирует, что любые настройки, производимые вами с осями виртуального станка, могут быть достигнуты на реальном станке.
- Выберите вкладку «Динамический контроль станка» > панель «Параметры» > «Параметры», чтобы открыть диалоговое окно Динамический контроль станка, и выберите вкладку Ограничения оси.
- Для обеих осей А и В выберите опцию Ограничить ось и задайте значение приращения, равное 2.
- Переконфигурируйте положение станка и ось инструмента.
- Выберите вкладку «Динамический контроль станка» > панель «Управление осью инструмента» > «Относительно станка», чтобы показать маркеры захвата, выровненные по осям станка.
- Используйте эти маркеры захвата для изменения конфигурации станка.
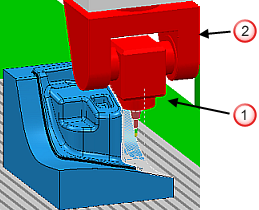
- Выберите вкладку «Динамический контроль станка» > панель «Утилиты» > «Поменять конфигурацию», чтобы сменить конфигурацию станка. PowerMill улучшает безопасный зазор станка путем настройки конфигурации станка (в частности, поворачивая шпиндель станка на 180 градусов) без изменения оси инструмента.
- Дважды щёлкайте по различным областям траектории, чтобы убедиться, что новая конфигурация и ось инструмента не приводят к столкновениям.
- Выберите вкладку «Динамический контроль станка» > панель «Правка» > «Обновить траекторию», чтобы обновить новое положение станка и ось инструмента.
- Для левой стороны обрабатываемой заготовки нужна похожая траектория. Повторите шаг 5, чтобы получить подходящее положение станка и ось инструмента.

- Выберите вкладку «Динамический контроль станка» > «Утилиты» > «Создать локальную СК» > «Ориентирован по инструменту», чтобы создать рабочую плоскость, выровненную по инструменту. Можно использовать эту ЛСК, когда создаете траекторию для этой области.
- Выберите вкладку «Динамический контроль станка» > панель «Готово» > «Принять», чтобы принять изменения.