コラムの後続移動の算出、および、空間と時間における位置の比較により、干渉予測は、コラム間で起こり得る潜在的干渉をチェックします。オーバーラップが検出されると、検査を停止して警告を表示します。干渉の可能性がない場合、オンライン干渉予測構成 ダイアログで、干渉検出感度を変更することができます。
干渉検出設定の変更方法
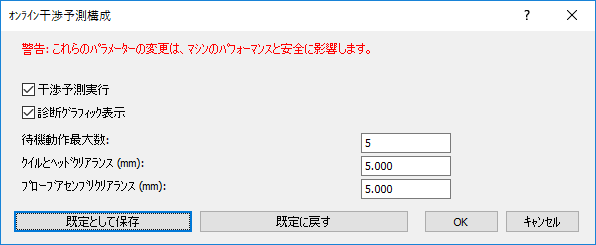
- [ツール]タブ > [シミュレーター] > [デュアルコラム] > [干渉予測構成]をクリックします。オンライン干渉予測構成 ダイアログが表示されます。
注: このオプションは、デュアルコラム CNC マシンの検査を作成する場合にのみ使用できます。
- 干渉予測を無効にするには、干渉予測実行 を選択解除します。
注: 干渉予測を無効にすると、プログラム実行 タブに警告が表示されます。
- CAD ビューに干渉予測フレームを表示しない場合は、診断グラフィック表示 を選択解除します。
- 干渉検出の設定を変更します。
- 待機動作最大数 - 干渉の事前予測を行う動作数を指定します。プローブの回転などの状況により、この機能の予測動作数が少なくなる場合があります。
- クイルとヘッドクリアランス - 近接警告を発するプローブ間の距離を入力します。
- プローブアセンブリクリアランス - 近接警告を発するプローブアセンブリ間の距離を入力します。
- 今後の検査ドキュメントの既定として、現在の設定を使用するには、既定として保存 をクリックします。
現在の既定設定に戻すには、既定に戻す をクリックします。
- OK をクリックして変更を保存し、ダイアログを閉じます。