第一个皮带轮视为驱动轮。其余皮带轮为从动轮或空转轮。可以使用每个皮带轮的功率比系数在多个从动轮之间分配输入功率。并相应地计算力和转矩。
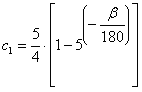
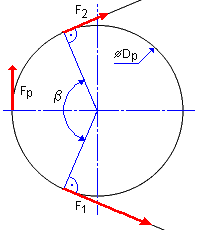
接触弧修正系数 c 1
接触弧修正系数用于修正接触弧不是 180 度的皮带轮的 V 形皮带的额定功率。修正系数的大小通过以下表达式确定。
安全系数 c 2
安全系数考虑每天的运行时间和传动设备类型以及从动机类型。安全系数用于修正传动功率。此外,还要考虑提高具有以下特点的传动装置的安全系数:高启动扭矩或高启动频率、高动态载荷或加速度。
皮带长度修正系数 c 3
皮带长度修正系数考虑长度不等于基本皮带长度的皮带的额定功率变化。该值由皮带制造商定义,并在皮带数据文件中进行了描述。对于皮带基本长度,长度修正系数值为 1.0,对结果没有影响。
皮带数修正系数 c 4
皮带数修正系数考虑使用多条 V 型皮带的传动的多条皮带间载荷分布的差异。每条皮带载荷的差异是由皮带长度差异和轴变形造成的。该系数按照下面的内置近似值表修正 V 型皮带的额定功率。该表中未列出的值将使用线性插值进行计算。
|
z |
1 |
3 |
6 |
999 |
|
c 4 |
1 |
0.95 |
0.9 |
0.85 |
皮带轮数修正系数 c 5
该系数用于修正皮带额定功率。该系数考虑其他皮带轮或空转轮引发的额外弯曲应力的影响。使用空转轮将影响皮带性能,皮带额定功率将因此而降低。
一般情况下,空转轮用于为具有固定中心距的传动装置提供卷紧装置、进行拐弯、皮带振动可能出问题时打断长跨距、保持拉伸状态以及用作离合设备等等。建议您避免使用空转轮(如果可能)。如果传动装置中确实需要空转轮,应设计空转轮尺寸和位置,使其对皮带寿命的负面影响降到最低。内空转轮至少应与传动功率最小的皮带轮一样大。
外空转轮至少应比传动功率最小的皮带轮大 50%。
默认情况下,皮带轮数修正系数由下面的内置近似值表确定。该表中未列出的值将使用线性插值进行计算。
|
k |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
100 |
|
c 5 |
1 |
0.91 |
0.86 |
0.81 |
0.78 |
0.76 |
0.75 |
0.7 |
拉伸系数 k 1
拉伸系数可以控制皮带的初始安装张力。可以按照皮带制造商建议的做法。如果不按照这些建议拉伸皮带,可能无法正确确定皮带的额定功率。安装拉伸对效率、皮带滑差和使用寿命有重大影响。常用皮带拉伸系数的大小介于 1.0 和 1.5 之间,但它是一个具有决定性的标准。
皮带拉伸不足将导致传动功率不足、效率降低、皮带过早损坏(因皮带滑差)。
皮带拉伸过度将导致特定表面压力过大、出现交叉弯曲风险、拉伸成员弯曲应力和应变增大,从而导致过早断裂和伸长。
合适的皮带拉伸是在正常载荷条件下恰好能够防止皮带打滑的拉伸。
效率转矩系数 η t
效率转矩系数描述皮带传动质量的级别。考虑了导致输出转矩减小的能量损耗。考虑系数,如皮带变形能量、凹槽中的湍流等。此时不包括皮带滑差导致的功率损耗,它由生成器单独确定。结合这两个因素得到最终的皮带驱动效率。
皮带滑差和总皮带驱动效率 η
皮带驱动系数在最可能出问题的皮带轮处确定,如
![]()
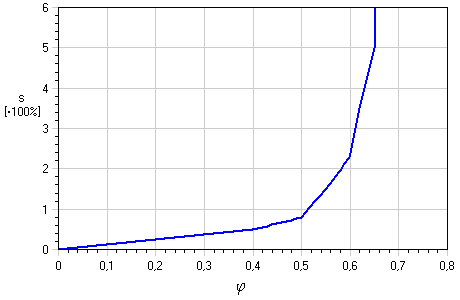
皮带滑差由内置滑差表定义。
从动轮速度
![]()
从动轮输出功率
P i = P xi F p v η t (1 - s)
![]()
内置滑差表
其中假设:
- 皮带滑差出现在驱动轮上,因此所有从动轮和空转轮的速度均受同一滑差影响。
- 忽略因滑差造成的皮带速度变化。常用皮带滑差大小为 1% ~ 2%,结果是 s = 0.01 ~ 0.02
传动比
为每个从动轮和空转轮确定 V 型皮带生成器的传动比。有三种具有特定含义的传动比类型。
|
i D |
[-] |
给定皮带轮所需的传动比(速度比)。此传动比将用作皮带轮尺寸的设计向导。用户可设置此传动比,让 V 型皮带生成器可以查找最接近的皮带轮直径以达到所需的传动比。 |
|
i T |
[-] |
给定皮带轮理想的传动比(速度比)。此传动比是由作为精确值的皮带轮直径直接计算的。不考虑皮带滑差。 |
|
i |
[-] |
给定皮带轮的传动比(速度比)。计算此传动比时需要考虑皮带滑差。将此值用作满载情况下皮带轮的最接近传动比。给定皮带轮的功率和轴速度是使用此传动比确定的。 |
根据皮带速度修改的摩擦 f mod
根据皮带速度修改的摩擦系数描述皮带速度对摩擦系数变化影响的程度。如果修改的摩擦系数为零,则不会影响摩擦系数。
结果安全系数 c PR
结果安全系数由下面的表达式确定。给定传动布局的皮带额定功率与传动功率之比。结果安全系数将迅速答复皮带驱动过度设计的程度。
![]()
|
c PR < c 2 |
强度校核失败 |
|
c PR ≥ c 2 |
强度校验成功 |
|
c PR > c 2 |
考虑更改传动布局,使用其他皮带或减小皮带宽度 |
所用变量的含义:
|
β |
接触弧 [deg] |
|
F p |
有效拔模(或有效拉伸)[N] |
|
n 1 |
驱动轮的速度 [rpm] |
|
n i |
指定从动轮的速度 [rpm] |
|
i |
给定皮带轮的传动比(速度比)[-] |
|
s |
皮带滑差 [-] |
|
P x |
给定皮带轮的功率比 [-] |
|
P R |
皮带额定功率,一个皮带可以传动的功率 [W] |
|
v |
皮带速度 [m/s] |
|
η t |
效率转矩系数 [-] |
|
P |
传动功率 [W] |
|
z |
皮带数 [-] |