输入数据:
- 基本半径 r 0 (盘式凸轮和圆柱凸轮)
- 运动长度 l c (线性凸轮)
- 凸轮宽度 b c
- 滚子半径 r r
- 滚子宽度 b r (对于从动件形状圆柱)
- 偏心 e(用于平动从动件的盘式凸轮)
- 偏心角 α(用于平动从动件的线性凸轮和圆柱凸轮)
- 枢轴距离 y(用于摆动臂的盘式凸轮和线性凸轮)
- 臂长度 l a (用于摆动臂的盘式凸轮和线性凸轮)
- 反作用力臂 l r (用于摆动臂的盘式凸轮和线性凸轮)
- 速度 ω(盘式凸轮和圆柱凸轮)
- 速度 v(线性凸轮)
- 滚子上的力 F
- 加速的重力 m
- 弹性率 c
- 许用压力 p A1
- 凸轮材料的弹性模量 E 1
- 凸轮材料的泊松比 μ 1
- 许用压力 p A2
- 从动轮材料的弹性模量 E 2
- 从动轮材料的泊松比 μ 2
|
盘式凸轮 |
|
|
|
|
|
线性凸轮 |
|
|
|
|
|
圆柱凸轮 |
|
 |
|
|
外径 = 2r 0 + b c |
|
|
内径 = 2r 0 - b c |
|




凸轮行程段
- 运动功能 f y (z) [ul]
- 倒转比 k r (仅用于线性零件的抛物线运动)
- 线性零件 k l (仅用于线性零件的抛物线运动)
- 运动起始位置 l 0 [°; mm, in]
- 运动终止位置 l [°; mm, in]
- 段运动长度 dL = L - L 0 [°; mm, in]
- 起点处行程 h 0 [mm, in]
- 终点处行程 h max [mm, in]
- 段行程 d h = h max - h 0 [mm, in]
行程从属性
盘式凸轮和圆柱凸轮
凸轮旋转角 ϕ i [°]
在段中的实际相对位置:z i = (ϕ i - l 0 ) / dl (range 0 - 1)
|
行程 |
y i = dh f y (z) [mm, in] |
|
速度 |
|
|
|
|
|
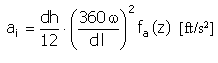
加速度 |
|
|
|
|
|
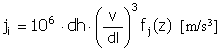
跃度 |
|
|
|




线性凸轮
凸轮运动位置 L i [mm, in]
在段中的实际相对位置:z i = (L i - L 0 ) / dL (range 0 - 1)
|
行程 |
y i = dh f y (z) [mm, in] |
|
速度 |
|
|
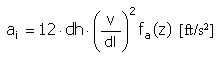
加速度 |
|
|
|
|
|
跃度 |
|
|
|


运动功能
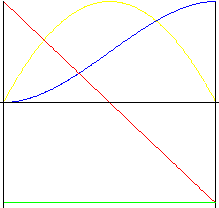
摆线(延长的正弦曲线)
此运动具有出色的加速特性。此运动通常用于高速凸轮,因为它可以实现低级别噪音、振动和磨损。

|
|
行程 |
|
|
速度 |
|
|
加速度 |
|
|
跃度 |
|
行程 |
f y (z) = z - 0.5/π sin(2πz) |
|
速度 |
f v (z) = 1 - cos (2πz) |
|
加速度 |
f a (z) = 2π sin(2πz) |
|
跃度 |
f j (z) = 4π 2 cos(2πz) |
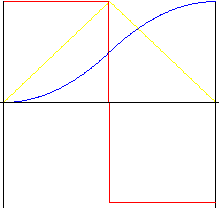
谐波(正弦曲线)
在冲击期间可以保持平滑的速度和加速度是该曲线的固有优势。但是,在运动起点和终点处,加速度的瞬间变化会导致振动、噪音和磨损。

|
|
行程 |
|
|
速度 |
|
|
加速度 |
|
|
跃度 |
|
行程 |
f y (z) = 0.5 (1 - cos πz)) |
|
速度 |
f v (z) = 0.5 π sin (πz) |
|
加速度 |
f a (z) = 0.5 π 2 cos(πz) |
|
跃度 |
f j (z) = -0.5π 3 sin(πz) |
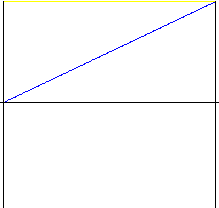
线性
在运动起点和终点处会产生巨大冲击的简单运动。很少使用这种运动(除非在非常简易的设备中)。建议您使用已修改运动起点和终点的运动 - 具有线性部分的抛物线。
|
|
行程 |
|
|
速度 |
|
行程 |
f y (z) = z |
|
速度 |
f v (z) = 1 |
|
加速度 |
f a (z) = 0 |
|
注: z = 0 和 z = 1 时,正确值应该是无穷大的值,但计算时不能使用无穷大的值,要使用零。
|
|
|
跃度 |
f j (z) = 0 |
|
注: z = 0 和 z = 1 时,正确值应该是无穷大的值,但计算时不能使用无穷大的值,要使用零。
|
抛物线(2 阶多项式)
具有最小可能加速度的运动。但是,若在运动的起点、中间和终点处加速度突然变化,也会产生冲击。倒转比使得可以通过运动中的“拉伸”来允许加速度和加速度比率的变化。
对称(倒转比 k r = 0.5)
|
|
行程 |
|
|
速度 |
|
|
加速度 |
|
z = 0 至 0.5 时: |
|||
|
行程 |
fy(z) = 2z 2 |
||
|
速度 |
fv(z) = 4z |
||
|
加速度 |
fa (z) = 4 |
||
|
跃度 |
fa(z) = 0 |
||
|
z = 0.5 至 1 时: |
|||
|
行程 |
fy(z) = 1 - 2(1 - z) 2 |
||
|
速度 |
fv(z) = 4 (1 - z) |
||
|
加速度 |
fa (z) = -4 |
||
|
跃度 |
fj(z) = 0 |
||
|
注: z = 0 和 z = 1 时,正确值应该是无穷大的值,但计算时不能使用无穷大的值,要使用零。
|
|||
非对称
k r - 倒转比(在范围 0.01 至 0.99 内)

|
|
行程 |
|
|
速度 |
|
|
加速度 |
|
z = 0 至 k r 时: |
|||
|
行程 |
f y (z) = z 2 / k r |
||
|
速度 |
f v (z) = 2z / k r |
||
|
加速度 |
f a (z) = 2 / k r |
||
|
跃度 |
f j (z) = 0 |
||
|
z = k r 至 1 时: |
|||
|
行程 |
f y (z) = 1 – (1 – z) 2 / (1 – k r ) |
||
|
速度 |
f v (z) = 2 (1 – z) / (1 – k r ) |
||
|
加速度 |
f a (z) = -2 / (1 - k r ) |
||
|
跃度 |
f j (z) = 0 |
||
|
注: z = 0 和 z = 1 时,正确值应该是无穷大的值,但计算时不能使用无穷大的值,要使用零。
|
|||
具有线性部分的抛物线
可以比线性运动提供更多合适的加速度和减速度。倒转比使得可以通过运动中的“拉伸”来允许加速度和加速度比率的变化。线性零件比允许设置线性运动零件的相对大小。

|
|
速度 |
|
|
加速度 |
|
|
跃度 |
k r - 倒转比(在范围 0.01 至 0.99 内)
k l - 线性零件比(在范围 0 至 0.99 内)
k z = 1 + k l / (1 - k l )
k h = (1 - k l ) / (1 + k l )
|
z = 0 至 k r / k z 时: |
|||
|
行程 |
f y (z) = k h z 2 k z 2 / k r |
||
|
速度 |
f v (z) = 2 k h z k z 2 / k r |
||
|
加速度 |
f a (z) = 2 k h k z 2 / k r |
||
|
跃度 |
f j (z) = 0 |
||
|
z = k r / k z 至 r / k z + k l 时: |
|||
|
行程 |
f y (z) = (z - 0.5 k r / k z ) 2 / (1 + k l ) |
||
|
速度 |
f v (z) = 2 / (1 + k l ) |
||
|
加速度 |
f a (z) = 0 |
||
|
跃度 |
f j (z) = 0 |
||
|
z = k r / k z + k l 至 1 时: |
|||
|
行程 |
f y (z) = 1 - k h (1 - z) 2 k z 2 / (1 - k r ) |
||
|
速度 |
f v (z) = 2 k h (1 - z) k z 2 / (1 - k r ) |
||
|
加速度 |
f a (z) = -2 k h k z 2 / (1 - k r ) |
||
|
跃度 |
f j (z) = 0 |
||
3 阶多项式(3 次抛物线)
比 2 次抛物线运动所受冲击更小的运动。
|
|
行程 |
|
|
速度 |
|
|
加速度 |
|
|
跃度 |
|
行程 |
f y (z) = (3 -2z) z 2 |
|
速度 |
f v (z) = (6 - 6z) z |
|
加速度 |
f a (z) = 6 - 12z |
|
跃度 |
f j (z) = -12 |
4 阶多项式
比 3 次抛物线运动所受冲击更小的运动。

|
|
行程 |
|
|
速度 |
|
|
加速度 |
|
|
跃度 |
|
z = 0 - 0.5 时 |
||
|
行程 |
f y (z) = (1 - z) 8z 3 |
|
|
速度 |
f v (z) = (24 - 32z) z 2 |
|
|
加速度 |
f a (z) = (48 - 96z) z |
|
|
跃度 |
f j (z) = 48 - 192z |
|
|
z = 0.5 - 1 时 |
||
|
行程 |
f y (z) = 1 - 8z (1 - z) 3 |
|
|
速度 |
f v (z) = (32z - 8) (1 - z) 2 |
|
|
加速度 |
f a (z) = (48 - 96z) (1 - z) |
|
|
跃度 |
f j (z) = 194z - 144 |
|
5 阶多项式
比 3 次抛物线运动所受冲击更小的运动。

|
|
行程 |
|
|
速度 |
|
|
加速度 |
|
|
跃度 |
|
行程 |
f y (z) = (6z 2 - 15z + 10) z 3 |
|
速度 |
f v (z) = (z 2 - 2z + 1) 30z 2 |
|
加速度 |
f a (z) = (2z 2 - 3z + 1) 60z |
|
跃度 |
f j (z) = (6z 2 - 6z + 1) 60 |
7 阶多项式
所有公式中的平滑度(包括跃度)

|
|
行程 |
|
|
速度 |
|
|
加速度 |
|
|
跃度 |
|
行程 |
f y (z) = (-20z 3 + 70z 2 - 84z + 35) z 4 |
|
速度 |
f v (z) = (-z 3 + 3z 2 - 3z + 1) 140z 3 |
|
加速度 |
f a (z) = (-2z 3 + 5z 2 - 4z + 1) 420z 2 |
|
跃度 |
f j (z) = (-5z 3 + 10z 2 - 6z + 1) 840z |
5 阶非对称多项式
与 5 阶多项式类似,但是具有强制返程。

|
|
行程 |
|
|
速度 |
|
|
加速度 |
|
|
跃度 |
|
第 1 部分 |
||
|
行程 |
f y (z) = 1 - (8 (1 - z) 3 - 15 (1 - z) 2 + 10) (1 - z) 2 / 3 |
|
|
速度 |
f v (z) = (2 (1 - z) 3 - 3 (1 - z) 2 + 1) (1 - z) 20 / 3 |
|
|
加速度 |
f a (z) = -(8 (1 - z) 3 - 9 (1 - z) 2 + 1) 20 / 3 |
|
|
跃度 |
f j (z) = (4 (1 - z) 2 - 3 (1 - z)) 40 |
|
|
第 2 部分 |
||
|
行程 |
f y (z) = (8z 3 - 15z 2 + 10) z 2 / 3 |
|
|
速度 |
f v (z) = (2z 3 - 3z 2 + 1) z 20/3 |
|
|
加速度 |
f a (z) = (8z 3 - 9z 2 + 1) 20/3 |
|
|
跃度 |
f j (z) = (4z 2 - 3z) 40 |
|
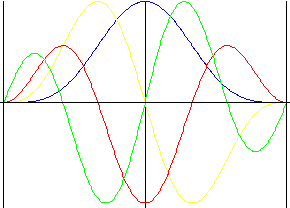
双谐波
所有公式中的平滑度(包括跃度)都具有强制返程。
|
第 1 部分 |
||
|
行程 |
f y (z) = cos(0.5π (1 - z)) 4 |
|
|
速度 |
f v (z) = π (0.5 sin(πz) - 0.25 sin(2πz)) |
|
|
加速度 |
f a (z) = 0.5 π 2 (cos(πz) - cos(2πz)) |
|
|
跃度 |
f j (z) = π 3 (-0.5 sin(πz) + sin(2πz)) |
|
|
第 2 部分 |
||
|
行程 |
f y (z) = 1 - cos(0.5π z) 4 |
|
|
速度 |
f v (z) = π (0.5 sin(πz) + 0.25 sin(2πz)) |
|
|
加速度 |
f a (z) = 0.5 π 2 (cos(πz) + cos(2πz)) |
|
|
跃度 |
f j (z) = -π 3 (0.5 sin(πz) + sin(2πz)) |
|
最大相对值的比较
|
运动 |
速度 |
加速度 |
跃度 |
|
摆线(延长的正弦曲线) |
2 |
6.28 |
39.5 |
|
谐波(正弦曲线) |
1.57 |
4.93 |
15.5 |
|
线性 |
1 |
∞ |
∞ |
|
抛物线(2 阶多项式) |
2 |
4 |
∞ |
|
3 阶多项式 |
1.5 |
6 |
12 |
|
4 阶多项式 |
2 |
6 |
48 |
|
5 阶多项式 |
1.88 |
5.77 |
60 |
|
7 阶多项式 |
2.19 |
7.51 |
52.5 |
|
5 阶非对称多项式 |
1.73 |
6.67 |
40 |
|
双谐 |
2.04 |
9.87 |
42.4 |
其他从属性
滚子上的力
|
F i = F + m a i + c y i [N, lb] |
法向力
|
Fn i = F i / cos (γ i ) [N, lb] |
力矩
|
T i = F i r i tan (γ i ) [Nmm, lb in] |
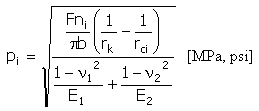
具体(赫兹)压力
|
|
|
|
b = min (b v, b k ) |