使用“透视匹配”
摄影机匹配视频字幕:在 VRED 2020 中,我们现在可以针对背景图像匹配摄影机,这样底板中的透视将与三维场景中的摄影机相匹配。现在,您不必再猜测正确的透视,也不必使用外部工具来达到此目的。该工具位于“摄影机编辑器”的“高级”选项卡中。只需启用“透视匹配”,并使用 X、Y 和 Z 选项相应地对齐终止线,如本示例所示。放大镜将帮助您找到正确的位置。现在,您可以根据背景调整对象的位置,而不丢失正确的摄影机角度。在“透视匹配”模式下,可以进行平移、缩放和约束围绕摄影机轴的水平鼠标导航。垂直导航将自动禁用。
一旦您准备好使用“透视匹配”,请查看以下有用的提示:
使用“透视匹配”之前,根据自己的喜好,定位、缩放和旋转底板。可以使用“场景板编辑器”执行此操作。
在“摄影机编辑器”中选择“垂直”或“水平”视野模式(FOV 模式)选项。
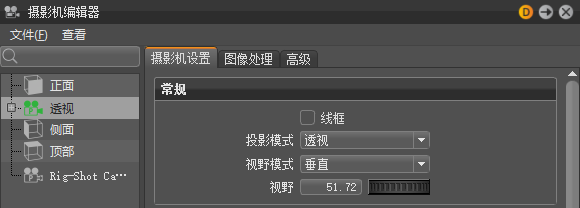
默认的视野模式是“垂直”,可缩放底板以在垂直方向上布满当前视口。在“水平”FOV 模式下,可缩放底板以在水平方向上布满当前视口。
如果您的图像中存在终止线,则在放置“透视匹配”操纵器时将依赖这些终止线。在此示例中,由于平铺工作沿 X 和 Y 轴具有不同的线,因此请选择“XY 终止线”选项。

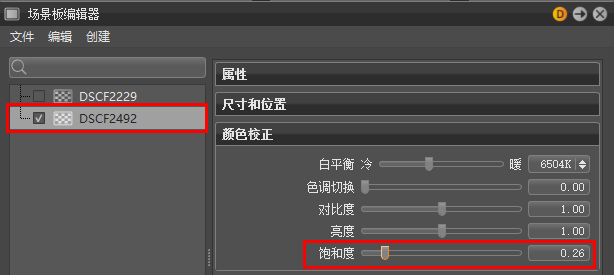
如果难以看到底板上的彩色终止线,请尝试降低底板的饱和度。在“场景板编辑器”中,选择底板。向下滚动到“颜色校正”设置,更改饱和度,同时进行匹配。
如果要在模型上看到底板的半透明覆盖,请尝试降低重复前板的透明度。在“场景板编辑器”中,选择底板。按
 (“重复”图标)。在“属性”部分中,将“类型”更改为“前板”,然后增加“透明度”。
(“重复”图标)。在“属性”部分中,将“类型”更改为“前板”,然后增加“透明度”。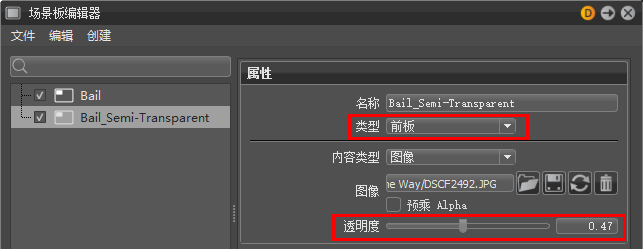
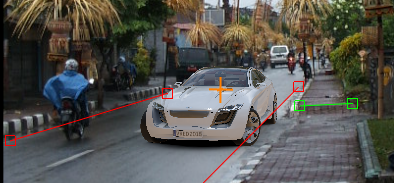
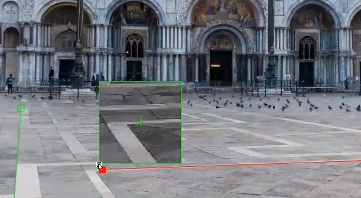
正确放置终止线
此示例图像显示了如何在场景中正确放置终止线。

如何使用“透视匹配”
当“透视匹配”处于活动状态时,VRED 将限制摄影机在视口中沿水平方向围绕当前摄影机轴(在视口中显示为橙色十字)的旋转。
这可确保在视口中摄影机导航不会中断透视匹配。实际上,摄影机会移动并旋转,因此看起来好像场景在地面上围绕摄影机轴进行旋转。此外,您也可以使用“透视匹配”的“旋转”选项在“摄影机编辑器”中实现此目的。有关其他信息,请参见“旋转”(见上文)。
我们建议为最终匹配的视图创建新视点。在“摄影机编辑器”中,在摄影机上单击鼠标右键,然后选择“创建”>“视点”。所有设置(包括终止线)均存储在视点中。
在菜单栏中,选择“场景”>“场景板编辑器”,然后在该编辑器中单击鼠标右键,选择“创建底板”,找到底板(可能是 .jpg),然后单击“打开”以加载底板。
注意:使用“透视匹配”工具之前,根据需要对底板进行定位、旋转和缩放。
在“摄影机编辑器”中,选择“高级”选项卡,滚动到参数底部,然后打开“透视匹配”部分。
点击“透视匹配”按钮以启用该工具。
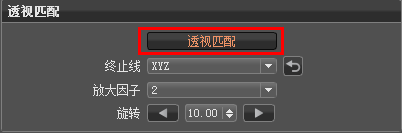
从“终止线”选项中选择一个选项,以便在您的图像中设置终止线。默认情况下,坐标空间是 Z 轴向上。
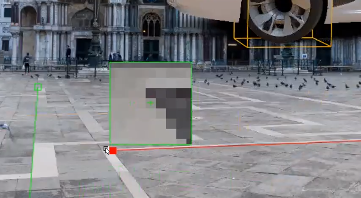
沿 X 轴的一条直线定位 X 操纵器,然后沿 Y 轴定位 Y 操纵器。有关如何使用放大因子精确定位操纵器控制柄的信息,请参见使用放大镜定位终止线。
现在,您可以使用摄影机进行平移以定位对象,将它向前和向后移动。
使用“旋转”来旋转对象。设置度数,然后使用箭头顺时针或逆时针旋转。
疑难解答
在本部分中,可以找到使用“透视匹配”时常见问题的解决方案。
我的底板图像是倾斜的
如果底板图像中的地平线是倾斜的,则说明“透视匹配”将倾斜角度设置为摄影机“侧滚”参数(位于“镜头属性”部分中)。
默认的“侧滚”值为 0°。请记住,在匹配后将同一摄影机用于不同目的时,请检查“侧滚”参数,并在必要时将其重置为 0。

在“摄影机编辑器”的“摄影机设置”选项卡中,打开“镜头属性”部分。
点击并拖动以滚动滚轮来校正倾斜,并在视口中查看所做的更改。
注意:默认的“侧滚”值为 0°。 请记住,在匹配后将同一摄影机用于不同目的时,请检查“侧滚”参数。如果此参数已更改,则将其重置为 0。
想使街道或汽车看起来更有活力? 请尝试以下方法之一:
在拍摄照片时倾斜摄影机,以便在图像中生成最终外观。将图像导入到 VRED,并执行“透视匹配”(如果您有必需的终止线)。
您的照片是在摄影机保持笔直的情况下拍摄的,但您希望图像倾斜以创建动态外观。将图像导入到 VRED,然后在“场景板编辑器”中旋转和缩放底板。现在,使用“透视匹配”。您还将获得一个“侧滚”角度。
使用放大镜定位终止线
按住 Shift 键并单击终止线以进行定位。
按住 Shift 键并单击终止线的控制柄,以访问放大镜。这提供了控制柄周围区域的放大视图,以帮助您进行放置。
如果需要进一步放大,请更改“放大因子”选项。
提示:设置较大的值,以更清楚地查看该区域,并精确地放置控制柄。
我的模型不在屏幕中
放置终止线时,摄影机参数将自动调整为当前的匹配结果。这将重新定位您的模型,使其不在屏幕中。如何让您的模型重新显示在屏幕中?请执行以下步骤:
- 完成终止线的放置。
- 从“场景图形”中,选择要渲染的模型,然后按 Shift + F 组合键或使用“缩放到”按钮。这将缩放到所选模型,并将其放置在摄影机的中心。
- 现在,在视口中更改摄影机平移和到模型的距离,以便将模型正确地放置在底板前面。
“透视匹配”的 Python 命令
以下是用于“透视匹配”的函数和类型:
vrdCameraBaseNode.getPerspectiveMatch()vrdCameraNode.updateFromPerspectiveMatch()vrdPerspectiveMatch