Editing arms and legs is mostly the same, with a few minor differences that are covered in this topic.
-
Select a limb bone. >
 Modify panel > Limb Setup rollout
Modify panel > Limb Setup rollout
The Difference Between Arms and Legs
There is no Create Limb button, but rather the option of creating an arm or leg. However, the differences between arms and legs are fairly trivial. Legs get a foot platform (a rectangular IK target) by default, and you can change an arm to use a foot platform rather than a cross-shaped IK target if you like.
An arm inherits motion from the hub differently than a leg. The arm inherits the rotation off the ribcage but rotates it over so it points sideways and a leg flips over completely so that is points downwards by default. You can see this by adding a new layer and then setting the limb to FK and all the rotation values to 0. You can see that the leg’s rotation is 180 degrees different from the hub it is attached to and the arm is 90 degrees different
Interface
Limbs are made up of a number of possible sub-elements. These include a collarbone, limb bones, and palms. Driver parameters for the limb are held in the Limb Setup rollout.
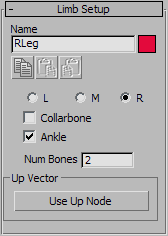
- Name
-
Edit the name of the limb in the field box. See Using CAT's Naming System.
- Color swatch
-
Click to change the limb color.
- L/M/R
-
Choose whether the limb functions as a left, middle, or right arm or leg. Middle limbs are useful in a tripodal structure.
-
 Copy/Paste/Paste Mirrored
Copy/Paste/Paste Mirrored -
Use these buttons for copying and pasting the limb settings to or from other limbs. See Copying and Pasting Rig Parts.
- Collarbone
-
When on, the limb incorporates a collarbone, which is an extra bone between it and the hub. The collarbone is not part of the limb’s IK chain.
By default, an arm has the Collarbone option on, while a leg has it off.
- Palm/Ankle
-
When on, an arm has a palm at the end, while a leg has an ankle. See Palms, Ankles, and Digits.
- Num Bones
-
The number of bones in the limb. Range=1 to 20.
- Use Up Node
-
When on, the software creates an upnode as an IK target: a cross-shaped Point helper on the limb axis. This now defines the upvector of the limb, and constrains the motion a bit more than the default. The upnode is particularly helpful when using the LookAt constraint, to define which direction is “up.”