The toolset of this rollout lets you create and edit twist poses for a biped's limbs.
-
Select a biped. >
 Motion panel > Twist Poses rollout
Motion panel > Twist Poses rollout
You can either use the rollout's preset poses (which you can modify and rename), or create your own. When you add a new pose, you establish a reference between the selected's limb relative orientation and the rollout's Twist value of 0 (which means no twist). When more than one reference pose are set for a rotated limb, the limb's twisting is calculated based on the nearest pose.
The Twist Poses rollout tools only affect limbs with three degrees of freedom (DOF), such as upper arms and thighs, because you can control their twist links by rotating them. Two-DOF limbs (forearms and calves, for instance) differ due to the fact that you can only control their twist links if you rotate their child limb.
The upper arm can twist itself while the forearm needs the wrist to twist it.
Procedures
Example: To Add and Edit Twist Poses:
- Prepare a biped with five twist links on each upper arm.
- Exit
 (Figure Mode), and then expand the Twist Poses rollout.
(Figure Mode), and then expand the Twist Poses rollout. -
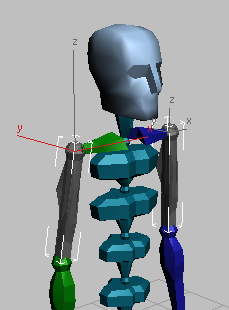
 Select the right upper arm.
Select the right upper arm. The rollout controls are enabled because you selected a three-DOF limb.
- Use
 (Previous Key) and
(Previous Key) and  (Next Key) to cycle through the different pose presets. Tip: You can often use these presets as a starting point for posing your limbs.
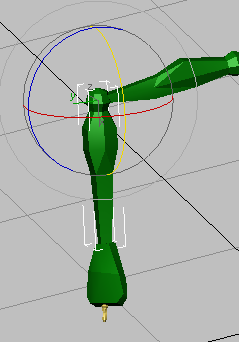
(Next Key) to cycle through the different pose presets. Tip: You can often use these presets as a starting point for posing your limbs. - Choose pose6 from the drop-down list.
The biped's arm extends upwards and shows some twisting.

- Click Set.
This assigns the Twist value of 0 to the upper arm's twist links.
Note: A twist change is always reflected on both sides (in this case, both upper arms). -
 Rotate the upper arm locally around its Y axis so it extends to the side.
Rotate the upper arm locally around its Y axis so it extends to the side. 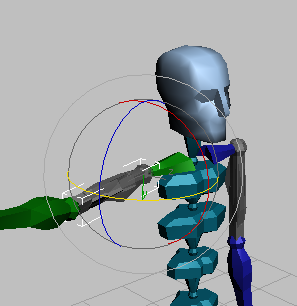
- Click Add to create a new pose. Rename it Arm At Side.
This new pose resets the current Twist value of the twist links.
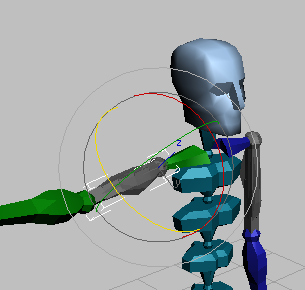
- Rotate the upper arm locally around its X axis.
The twisting in the upper arm is calculated based on the limb's proximity to the saved poses.
Rotate the upper arm to verify the twist links.
This procedure takes into account the concept of adding twist links to biped limbs and concentrates on using the tools from the Twist Poses rollout to set up basic poses.
Interface

- Previous/Next Key
-
Scrolls and selects through the list of twist poses.
- Twist Poses List
-
Lets you choose a preset or saved pose to apply to the biped's selected limb. By default, five twist poses are available for each three-DOF limb: Up, front, lateral, down, and back. You can also rename the current twist pose.
- Twist
-
Sets the amount of twist rotation (in degrees) applied to the twist links linked to the selected limb. The twist links from the opposite side are so affected. Default=0. Range=–180 to 180.
Note: Changing the Twist value automatically resets the current limb's orientation to the active twist pose. - Bias
-
Sets the distribution of rotation along the twist links. A setting of 1.0 concentrates the twist towards the top link while a setting of 0.0 instead concentrates it towards the bottom link. The default setting is 0.5, distributing the rotation evenly throughout the links. The twist links from the opposite side are so affected.
Note: Changing the Bias value automatically resets the current limb's orientation to the active twist pose.Note: You can also set a Bias value for Two-DOF limbs. - Add
-
Creates a new twist pose based on the selected limb's orientation and resets Twist and Bias to their default values.
Note: Adding a new pose for one limb automatically makes it available for the limb on the opposite side. - Set
-
Updates the active twist pose with the current Twist and Bias values.
- Delete
-
Removes the current twist pose.
- Default
-
Replaces all twist poses of all three-DOF limbs with five default preset poses.