Ensure that your point file does not contain more points than required for your surface.
An excessive number of points can mean a coverage area that is too large, or a point density that is too high. In either case, it requires more processing time when the surface is saved or regenerated. To avoid this situation, filter the point file on import, limiting the number of points imported, or sampling a fraction of the points.
To filter a point file on import
- In Toolspace, on the Settings tab, expand the Point
 Point File Formats collection.
Point File Formats collection. - Right-click the file type you want to import Properties.
- In the Point File Format dialog box (figure 1), set the options on the lower right to limit the total number of points and set a sampling rate.
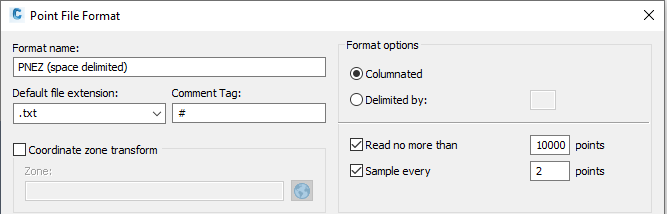
Figure 1: Settings for point file filtering
This type of filtering often makes sense when using LIDAR data, which contains points in a dense grid.