The 3 Points constraint is a rotations constraint where the position of three objects is used to constrain the rotation of another object.
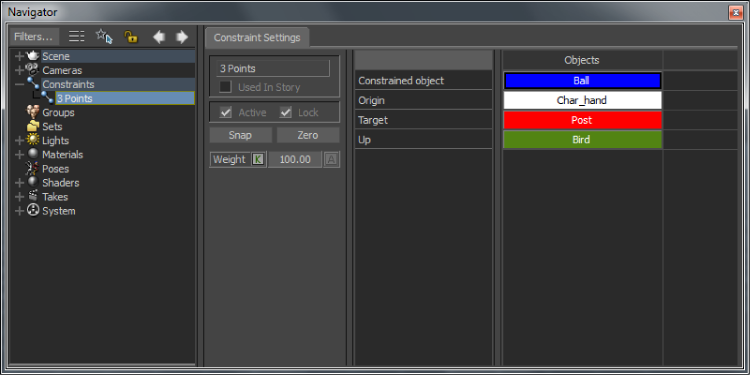
3 Points constraint
When you perform optical motion capture, only the translation of each sensor is captured. Optical sensors do not send rotation information.
However, the rotation of a limb, for example, can be derived based on the translation of three sensor positions.
See Optical motion data.
When you first activate or snap the Rotation From 3 Points constraint, it aligns the constrained object’s X-axis with the vector defined by the Origin and Target sources. The constraint then attempts to align the Y-axis of the constrained object to point towards the Up source.
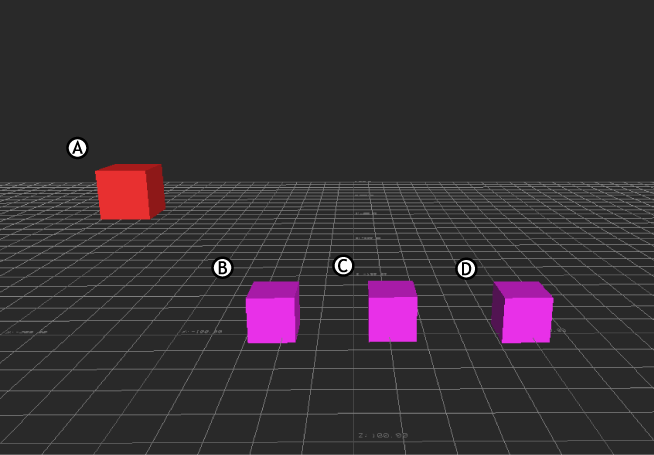
3 Points constraint A. Constrained object B. Up source object C. Origin source object D. Target source object.
In the following graphic, the cube A is the constrained object. When you move any of the three cubes (the sources) after the constraint is active, the X, Y, and Z rotation of the constrained object changes.
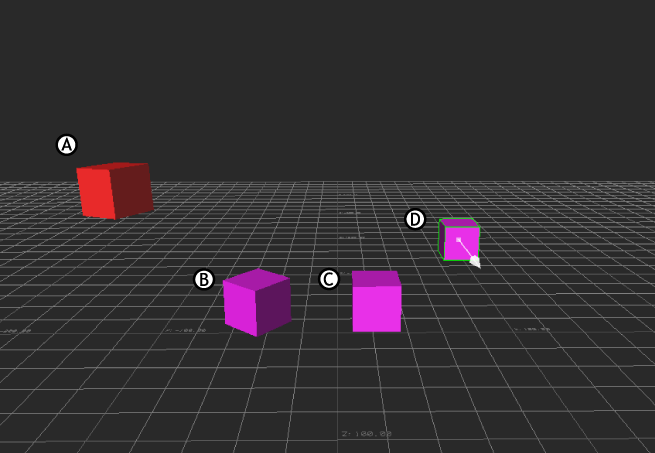
3 Points constraint activated: Translating B, C, and D rotates the constrained object (A) in various directions.