The Load Definition section varies depending on the Type selected on the Load form. It has three sub-sections: Direction, Coordinate System and Magnitude. The following examples illustrate some of the load types.
Direction:
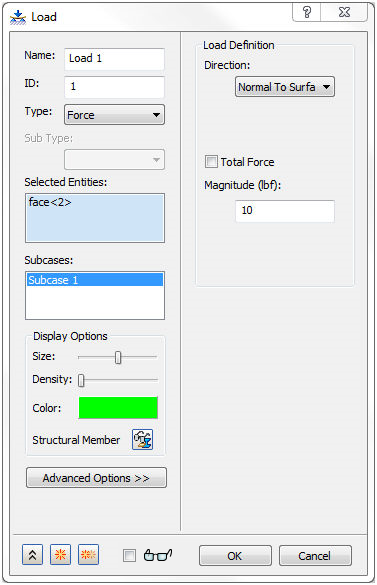
- If Type is Force, the load can be defined by specifying the direction and the vector Components or total value of the force (Magnitude).
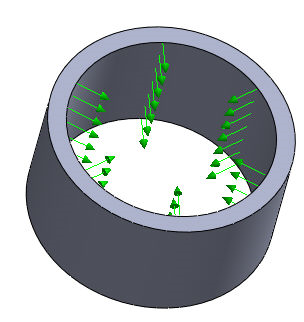
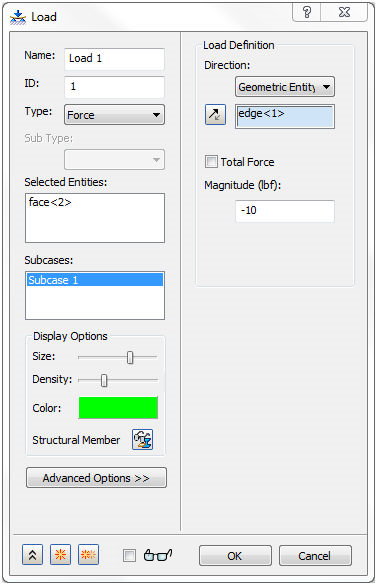
- Load direction can also be specified by selecting an edge/sketch from the Graphics area, when the Geometric Entity option is selected. The direction of load is the tangent vector at the start of the selected edge/sketch curve.
- You can select the following methods:
-
Components (default)

-
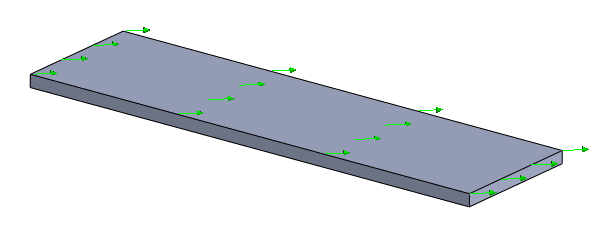
Normal to Surface
-
Geometric Entity
-
Components (default)
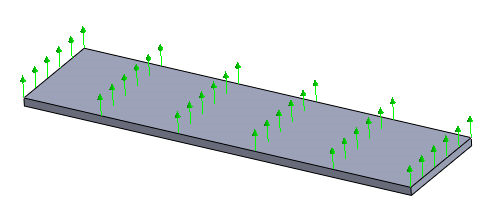
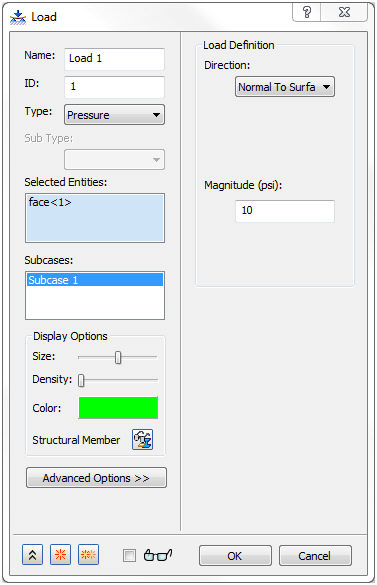
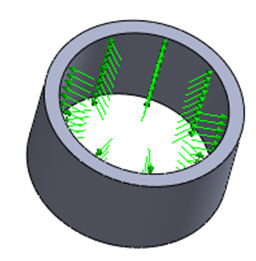
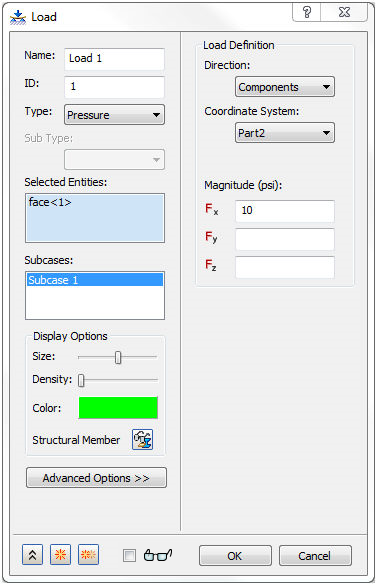
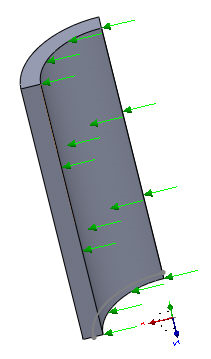
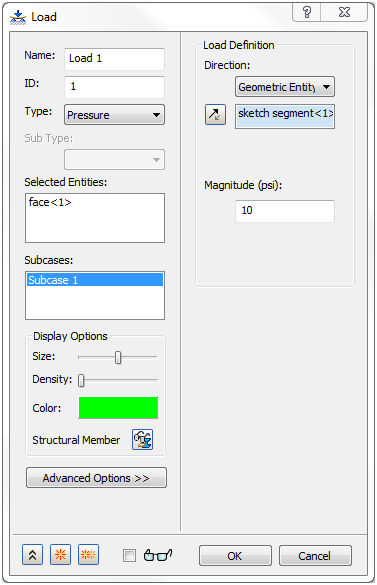
- If Type is Pressure, select a face and input a value in the Magnitude box to apply the pressure load when the Direction is Normal To Surface (default). It also supports Components and Geometric Entity.
- You can select the following methods:
-
Normal To Surface
(default)
-
Components
-
Geometric Entity
-
Normal To Surface
(default)
- You can select the following methods:
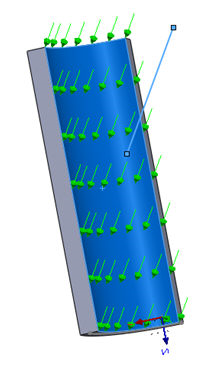
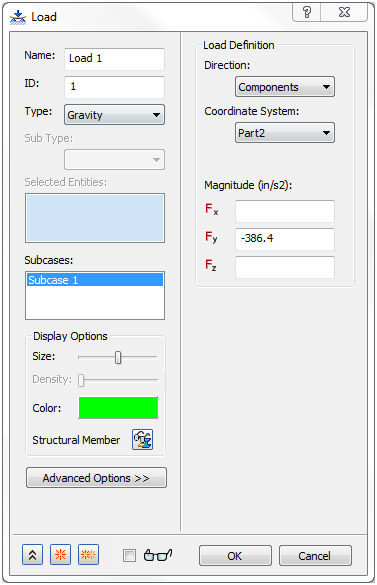
- If Type is Gravity, a body load can be specified by entering the acceleration value in the appropriate direction. It supports all the Direction options: Components, Normal To Surface and Geometric Entity.
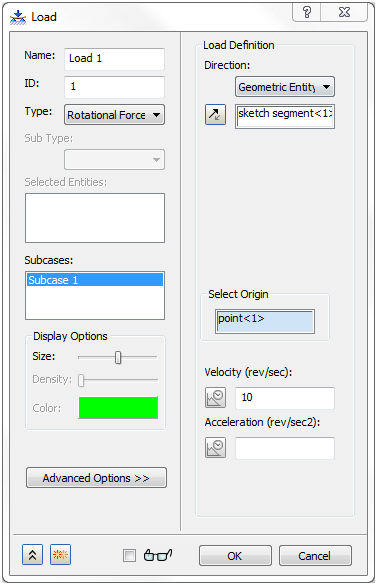
- If Type is Rotational Force, the Geometric Entity option allows you to use a defined geometric axis.
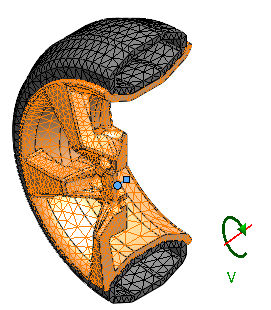
- If Type is Heat Generation, Temperature or Initial Conditions, a body load can be specified by entering the Magnitude value.
Coordinate System:
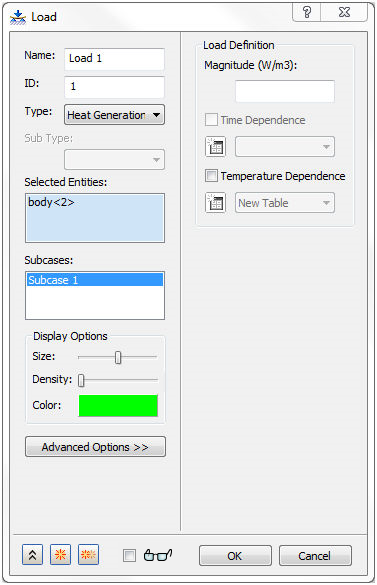
- You can select the Global and User defined coordinate system and Elemental coordinates when Distributed Load type is selected.
 When Elemental coordinates are selected, the Magnitude directions are changed as FXE, FYE and FZE in case of Force and as MXE, MYE and MZE in case of Moment.
When Elemental coordinates are selected, the Magnitude directions are changed as FXE, FYE and FZE in case of Force and as MXE, MYE and MZE in case of Moment.
Similar to Constraints, you can either drag-and-drop the Load or right-click and choose Subcase - Edit and highlight it to include it in the Analysis.
Similar to Forces, you can use Geometric Entity to use geometry to define a load direction.
The symbols of the Load show a convenient representation of the resultant force vector.