ShoulderRoundedTarget サブアセンブリを使用すると、路肩のラウンディングを作成することができます。
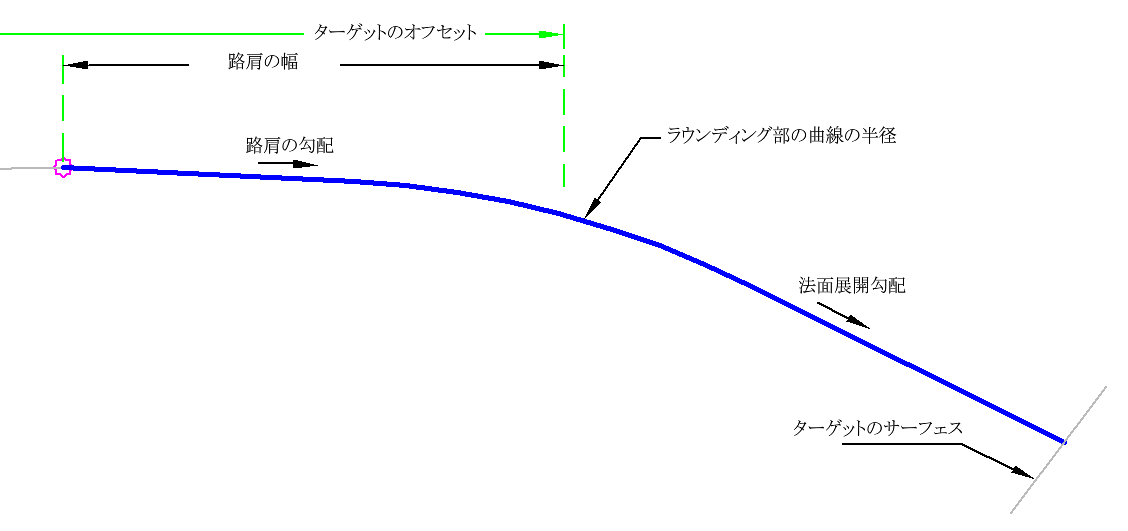
路肩は、アタッチメント ポイントからラウンディングの勾配変移点(PVI)までで計測されます。PVI とターゲット サーフェス間の距離が十分ではなくラウンディング部の曲線をうまく作成できない場合は、ラウンディング部の曲線の値が適合するように調整されます。ラウンディングされた路肩のジオメトリを定義することができます。
アタッチメント
アタッチメント ポイントは、舗装路肩の内端にあります。通常、この点は走行車線の外側の端にあります。
入力パラメータ
|
パラメータ |
説明 |
タイプ |
既定値 |
|---|---|---|---|
| 作成方向 | サブアセンブリを配置する側を指定します。 | 左側/右側 | 右側 |
| 路肩の勾配 | 路肩の勾配。 | 数値 | -5 ( % ) |
| 法面展開勾配 | 法面展開勾配の勾配。 | 数値、正 | 2 (: 1) |
| ラウンディング部の曲線 | 長さの値を指定します。 | 数値、正 |
2.5 ft 0.75 m |
| 路肩の幅 | アタッチメント ポイントから路肩ヒンジ ポイントまでの幅。 | 数値、正 |
5 ft 1.5 m |
ターゲット パラメータ
このセクションでは、1 つまたは複数のターゲット オブジェクトにマッピングすることが可能なサブアセンブリのパラメータを一覧表示します。詳細については、「コリドー ターゲットを指定するには」を参照してください。
|
パラメータ |
説明 |
ステータス |
|---|---|---|
|
法面展開サーフェス |
法面展開サーフェスの名前。ターゲットとして使用できるオブジェクト タイプはサーフェスです。 | オプション |
|
オフセット ターゲット |
路肩の幅を変更し、路肩の幅をオフセット線形に繋ぐ場合に使用します。オフセットを指定するターゲットとして、線形、ポリライン、計画線、および測量図形の各オブジェクト タイプが使用できます。 | オプション |
ランタイム ロジックの割り当て
なし。
出力パラメータ
なし。
動作
ラウンディング部の曲線の PVI の位置は、入力されたパラメータかオフセット ターゲット(設定されている場合)を使用して計算されます。次に、仮の法面展開リンクが計算されます。続いてカーブが計算され、残りのポイントとリンクがサブアセンブリに追加されます。
レイアウト モードの操作
レイアウト モードの場合、このサブアセンブリは路肩で構成されるリンクを表示します。
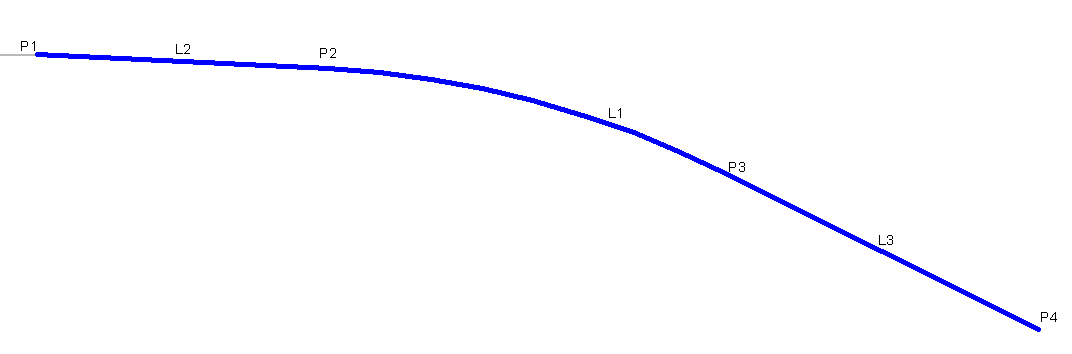
ポイント、リンク、およびシェイプ コード
次の表は、このサブアセンブリのポイント、リンク、およびシェイプ コードのうち、コードが割り当てられているものを一覧表示しています。このサブアセンブリのポイント、リンク、シェイプ コードのうち、コードが割り当てられていないものは表に含まれません。
|
ポイント、リンク、またはシェイプ |
コード |
説明 |
|---|---|---|
| P1 | Top、Hinge | |
| P4 | Daylight、Top | |
| L1 ~ L3 | Top |
コード図