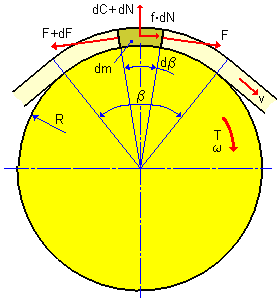
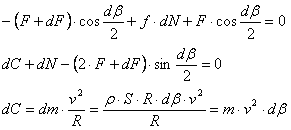
일반적으로 사용되는 방정식
|
|
|
|
여기에서 m은 벨트의 고유 질량으로 m = S ρ로 정의됩니다. |
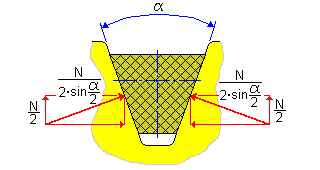
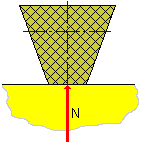
주어진 풀리의 수정 마찰계수
|
|
|
|
|
f = f g + v f mod |
연동 풀리 및 벨트 기본 방정식
전달할 동력
![]()
벨트 속도
![]()
벨트 플렉스 진동수
![]()
유효 인장(또는 유효 장력)
![]()
원심력
Fc = z m v 2
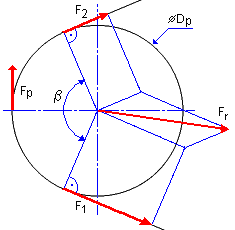
벨트 스팬의 장력
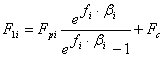
다음 방정식에서 응용프로그램은 하중을 전달하는 데 최대 벨트 장착 장력이 필요할 것으로 가장 의심되는 풀리를 먼저 결정합니다. 그런 다음 초기 벨트 장착 장력에 따라 모든 풀리에 대해 각 스팬의 벨트 장력을 조정합니다.
|
|
|
|
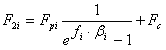
F 1i - F p P xi - F 2i = 0 |
|
|
|
|
|
|
가장 의심되는 풀리 기준은 견고한 면의 최대 장력입니다.
F 1max = max (F 1i )
벨트가 전체 하중에서 구동될 때 벨트 스팬의(벨트당) 전체 최대 장력은 다음과 같이 결정됩니다.
![]()
여기서 표현식 "k 1 F 1max "는 벨트 드라이브의 모든 벨트에 대해 고려되는 벨트 스팬의 실제 최대 인장입니다. 이러한 방식으로 개별 스팬의 모든 해당 인장은 다음 조건을 충족하도록 다시 계산됩니다.
F 1i - F P P xi - F 2i = 0
벨트가 전체 하중에서 구동될 때 각 풀리의 결과 축 하중
![]()
![]()
벨트 초기 장착 장력 및 정적 인장 조정 힘
필요한 벨트 초기 장착 장력(벨트당)은 인장 조정 힘에 따라 조정된 후 다음과 같이 결정됩니다.
![]()
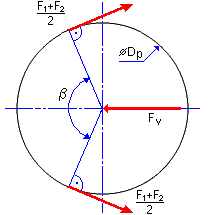
각 풀리에 대해 정적 인장 조정 힘 F v 가 결정됩니다. 응용프로그램은 다음과 같이 벨트 스팬의 중심선을 따라 수행되는 인장 조정 힘을 계산합니다.
|
|
|
사용된 변수의 의미:
| F | 접선력 [N] |
| β | 접촉 호 [도] |
| α | 쐐기 각도 [도] |
| C | 원심력 [N] |
| N | 법선력 [N] |
| m | 고유 벨트 질량 [kg/m] |
| v | 벨트 속도 [m/s] |
| R | 풀리 반지름 [m] |
| S | 벨트 횡단면 영역[m 2 ] |
| T | 주어진 풀리에 작용하는 토크 [Nm] |
| D p | 풀리 피치 지름 [m] |
| k | 풀리 수 [-] |
| P | 전달할 동력 [N] |
| v | 벨트 속도 [m/s] |
| F c | 원심력 [N] |
| F 1 | 주어진 풀리에 대한 입력 시 벨트 스팬의 장력 [-] |
| F 2 | 주어진 풀리에 대한 출력 시 벨트 스팬의 장력 [-] |
| f | 주어진 풀리의 수정된 마찰계수 [-] |
| P x | 주어진 풀리의 동력비 [-] |
| f g | 주어진 풀리 재질 및 벨트의 마찰계수 [-] |
|
f mod |
마찰 수정의 속도 계수 [s/m] |
| Z | 벨트 수 [-] |
| ρ | 벨트 밀도 [kg/m3] |
| F t | 벨트 초기 장착 장력 [N |
| F v | 주어진 풀리의 정적 인장 조정 힘 [N] |
| k 1 | 벨트 인장 계수 [-] |