Długość pasa jest określana w odniesieniu lub w systemie efektywnym. Z tego powodu odniesienie lub średnice efektywne są określane na początku dla każdego koła pasowego. Trajektoria pasa jest oparta na indywidualnym położeniu koła pasowego. Pozycja przesuwnego koła pasowego jest dostosowana tak, aby spełnić standardowe kryteria długości pasa. W trakcie obliczeń wykorzystywane jest rozwiązanie iteracji w celu znalezienia odpowiedniego położenia przesuwnego koła pasowego, najbliższego wymaganej (lub bieżącej) pozycji przesuwnego koła pasowego.
Wymiary koła
|
|
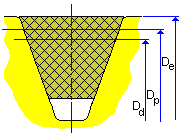
Koło rowkowane |
|
D e = D w + 2 h w |
|
|
D p = D w + 2 a |
|
|
D d = D w |
|
|
|
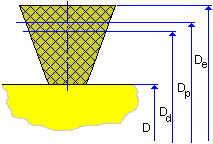
Kierunek płaskiego koła pasowego zgodny z ruchem wskazówek zegara |
|
D e = D + 2 h |
|
|
D p = D + 2 (h - h w + a) |
|
|
D d = D + 2(h - h w ) |
|
|
|
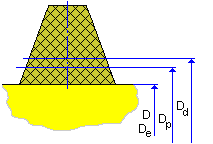
Kierunek płaskiego koła pasowego przeciwny do ruchu wskazówek zegara |
|
D e = D |
|
|
D p = D + 2 (h w - a) |
|
|
D d = D + 2 h w |
Przykład przenoszenia mocy z dwoma kołami pasowymi
W tym przykładzie użyty jest system odniesienia
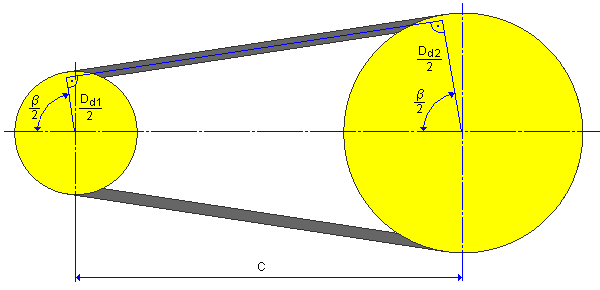
Łuk opasania
![]()
Długość pasa odniesienia
![]()
Odległość osi
![]()
Następujący wzór jest zalecany przy określaniu odległości osi nowego napędu
0,7 (D d1 + D d2 ) ≤ C ≤ 2(D d1 + D d2 )
Znaczenie użytych zmiennych:
|
D W |
Średnica nominalna (odniesienia lub efektywna) [m] |
|
D e |
Średnica efektywna (zewnętrzna) koła pasowego [m] |
|
h w |
Wysokość odniesienia (dla systemu efektywnego h w = 0) [m] |
|
a |
Odsunięcie linii podziału (gdy system efektywny jest ujemny) [m] |
|
D |
Nominalna i zewnętrzna średnica płaskiego koła pasowego [m] |
|
h |
Wysokość pasa [m] |
|
D d |
Średnica odniesienia koła pasowego [m] |
|
C |
Odległość osi [m] |
| β |
Łuk opasania [stopnie] |
|
L d |
Długość pasa odniesienia [m] |