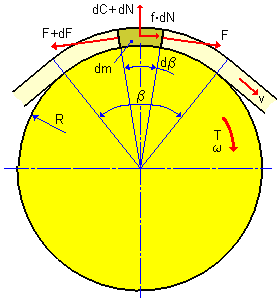
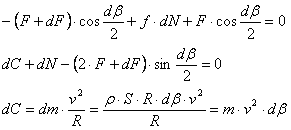
使用的通用表达式
|
|
|
|
其中 m 是皮带的质量密度,定义为 m = S ρ |
给定皮带轮的已修改摩擦系数
|
|
|
|
|
f = f g + v f mod |
驱动轮和皮带基本表达式
传动功率
![]()
皮带速度
![]()
皮带弯曲频率
![]()
有效拔模(或有效拉伸)
![]()
离心力
Fc = z m v 2
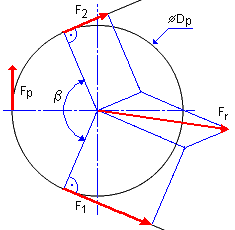
皮带范围内的张力
在以下表达式中,应用程序将先确定需要最大皮带安装张力以传动载荷的最可疑的皮带轮。然后,根据初始皮带安装张力,相应地调整所有皮带轮每个范围内的皮带张力。
|
|
|
|
F 1i - F p P xi - F 2i = 0 |
|
|
|
|
|
|
最可疑的皮带轮标准是最大紧边张力
F 1max = max (F 1i )
皮带驱动满载时,皮带范围(每条皮带)内的总最大拉伸由下面的表达式确定
![]()
其中表达式“k 1 F 1max ”是针对皮带驱动中的所有皮带而考虑的皮带范围内的最大实际张力。这样,将重新计算各个皮带的所有相应张力,以满足以下条件:
F 1i - F P P xi - F 2i = 0
皮带驱动满载时,每条皮带轮的合成轴载荷
![]()
![]()
注: 对于从动轮和空转轮,F
1
和 F
2
在生成器中的方向被反转了,因此 F
1
是皮带运动中输入时的皮带范围张力,F
2
是输出时的皮带范围张力。
皮带初始安装张力和静态张力
需要的皮带初始安装张力(每条皮带)可以根据张力进行调整,然后按如下表达式确定:
![]()
为每个皮带轮确定静态张力 F v 。应用程序按如下表达式计算沿皮带中心线实施的张力:
|
|
|
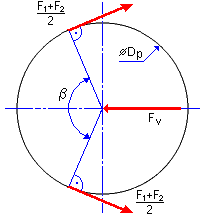
所用变量的含义:
| F | 切向力 [N] |
| β | 接触弧 [deg] |
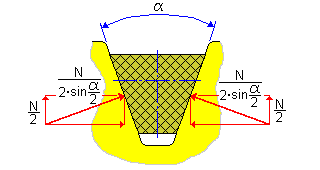
| α | 楔角 [deg] |
| C | 离心力 [N] |
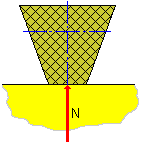
| N | 法向力 [N] |
| m | 皮带质量密度 [kg/m] |
| v | 皮带速度 [m/s] |
| R | 皮带轮半径 [m] |
| S | 皮带截面面积 [m 2 ] |
| T | 作用于给定皮带轮的扭矩 [Nm] |
| D p | 皮带轮节径 [m] |
| k | 皮带轮数 [-] |
| P | 传动功率 [N] |
| v | 皮带速度 [m/s] |
| F c | 离心力 [N] |
| F 1 | 给定皮带轮输入时的皮带范围内的张力 [-] |
| F 2 | 给定皮带轮输出时的皮带范围内的张力 [-] |
| f | 给定皮带轮的已修改摩擦系数 [-] |
| P x | 给定皮带轮的功率比 [-] |
| f g | 给定皮带轮材料和皮带的摩擦系数 [-] |
|
f mod |
摩擦的速度系数校正 [s/m] |
| Z | 皮带数 [-] |
| ρ | 皮带密度 [kg/m3] |
| F t | 皮带初始安装张力 [N |
| F v | 给定皮带轮的静态张力 [N] |
| k 1 | 皮带拉伸系数 [-] |
注: i = 皮带轮的指数