以下示例显示如何根据图表颜色和类别解释分析,以及 Maya 中的每个性能优化如何影响场景性能。所有这些示例均来自 Maya 2019 中的同一简单 FK 角色播放。
DG 解算(DG Evaluation)
- “脏传播”(Dirty Propagation)类别中的粉红色和紫色“脏传播”(Dirty Propagation)事件。
- “解算”(Evaluation)类别中的深绿色“拉力解算”(Pull Evaluation)事件。
- “VP2 解算”(VP2 Evaluation)类别中的蓝色“VP2 拉力平移”(VP2 Pull Translation)事件和浅蓝色“VP2 渲染”(VP2 Rendering)事件。
- “VP2 解算”(VP2 Evaluation)类别中的黄色事件显示 VP2 等待依存关系图节点中的数据所花费的时间。
在此示例中,每帧的大部分时间都花在“脏传播”(Dirty Propagation)上,您可以使用解算管理器(Evaluation Manager)解决此问题。
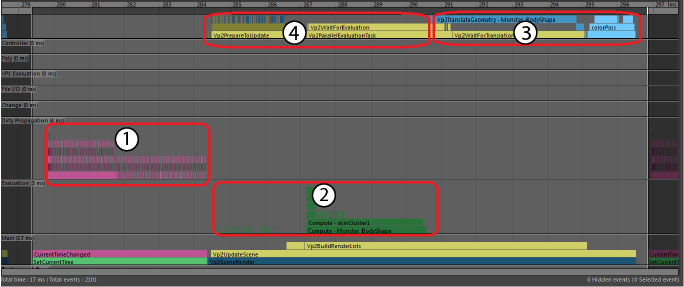
EM 并行解算(EM Parallel Evaluation)
- FK 彩色绑定的桃红色、褐色和棕色“EM 并行解算”(EM Parallel Evaluation)事件。高堆栈的事件表示正在并行发生一些解算。
- Maya 对蒙皮簇进行解算以计算变形网格时发生的褐色和棕色“EM 并行解算”(EM Parallel Evaluation)事件。由于依存关系图没有并行性,这些事件将相继发生。
- 深蓝色和蓝色“VP2 定向更新”(VP2 Direct Update)事件将数据转换为可进行 VP2 渲染的格式。
- “主要”(Main)类别中的黄色事件和“VP2 解算”(VP2 Evaluation)类别中的浅蓝色事件均为“VP2 渲染”(VP2 Rendering)事件。
在此示例中,在 Vp2SceneRender (4) 上花费的时间少很多。这是因为读取依存关系节点中的数据所花费的时间已从渲染转移至“EM 并行解算”(EM Parallel Evaluation)(1 和 2)。DG 解算使用数据拉模型,EM 解算则使用数据推模型。此外,某些几何体转换 (3) 也已从渲染转移至解算。我们将解算过程中的几何体转换称为“VP2 定向更新”(VP2 Direct Update)。
每帧的大部分时间都花在变形和转换几何体数据上,您可以使用“GPU 覆盖”(GPU Override)解决此问题。请参见使用解算管理器提高性能(Increase performance with the Evaluation Manager)中的“GPU 覆盖”(GPU Override)。
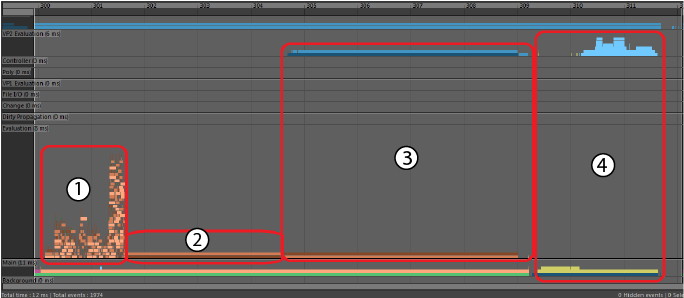
使用 GPU 覆盖进行 EM 并行解算(EM Parallel Evaluation with GPU Override)
- 浅黄色和深黄色“GPU 覆盖”(GPU Override)事件已取代“EM 并行解算”(EM Parallel Evaluation)分析的长串行中心部分(“EM 并行解算”(EM Parallel Evaluation)中的 2 和 3)。这些“GPU 覆盖”(GPU Override)事件表示 CPU 处理数据和启动 GPU 计算所花费的时间。
- 桃红色、褐色和棕色“使用 GPU 覆盖进行 EM 并行解算”(EM Parallel Evaluation with GPU Override)事件的持续时间与“EM 并行解算”(EM Parallel Evaluation)大致相同,尽管使用“GPU 覆盖”(GPU Override)的绑定解算事件的相对大小更大。此大小差异是由于此分析的比例不同于上一个分析,分别为 5 毫秒和 12 毫秒。
- 浅蓝色“VP2 渲染”(VP2 Render)事件出现过类似的相对拉伸 (2)。
EM 解算缓存播放(EM Evaluation Cached Playback)
- 黄色“恢复缓存”(Restore Cache)事件记录更新每个已缓存数据的 FK 绑定节点所需的时间。棕色“VP2 定向更新”(VP2 Direct Update)事件跟踪数据的 VP2 表示的更新。
- 变形网格的黄色“恢复缓存”(Restore Cache)事件。这表示将数据恢复到 Maya 节点以及将数据转换为 VP2 以使用“VP2 定向更新”(VP2 Direct Update)进行绘制所花费的时间。
EM VP2 硬件缓存播放(EM VP2 Hardware Cached Playback)
- 深蓝色“VP2 硬件缓存恢复”(VP2 Hardware Cache Restore)事件取代了长串行“缓存恢复”(Cache Restore)事件(上一个“EM 解算缓存播放”(EM Evaluation Cached Playback)部分中的 2)。恢复 VP2 硬件缓存的速度快很多,因为数据为可渲染格式且存储在 GPU 上。
- 灰色“缓存跳过”(Cache Skipped)事件显示依存关系节点中的数据未更新。
解算受限性能(Evaluation-Bound Performance)
当场景中的主要瓶颈是解算时,场景将被视为“解算受限”。有几个问题可能会导致解算受限性能。
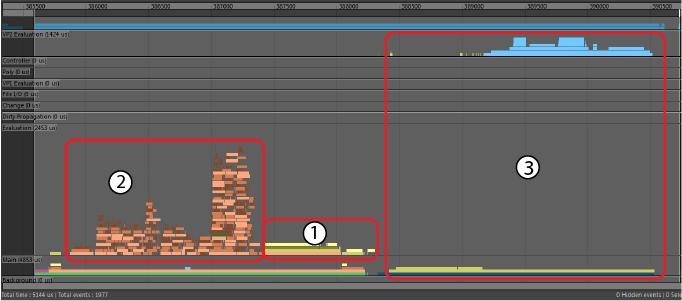
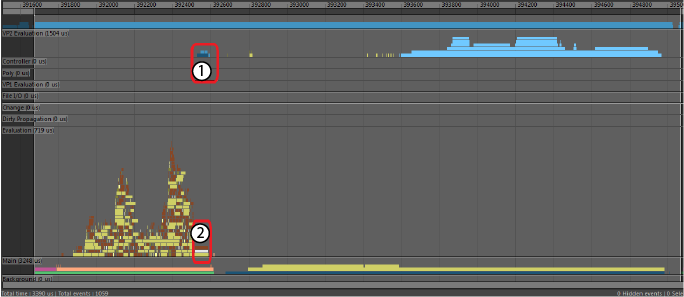
- 锁定争用(Lock Contention)
- 当多个线程尝试访问共享资源时,由于锁定管理开销,会发生“锁定争用”(Lock Contention)。如果无论您使用哪种解算模式,解算的持续时间大致相同,则可以断定发生了此事件。发生“锁定争用”(Lock Contention)时,线程必须等到其他线程使用完共享资源后才能继续。
-
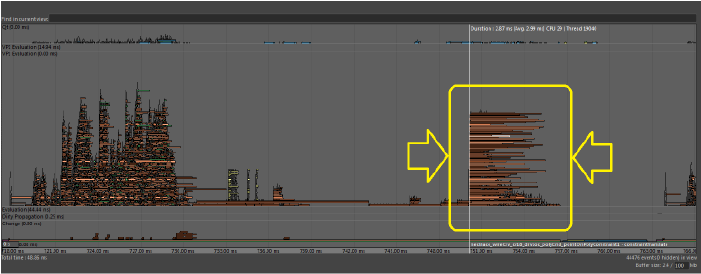
- 上图显示许多相同的任务几乎同时在不同线程上开始,在不同时间结束。此类型的分析显示可能存在多个线程需要同时访问的共享资源。
- 下面是显示类似问题的其他图像:
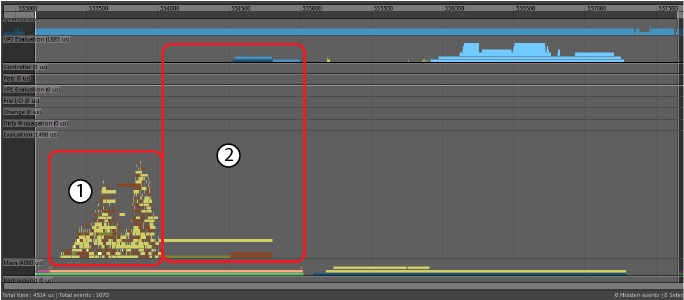
- 在这种情况下,由于多个线程正在执行 Python 代码,它们必须等待全局解释器锁定 (GIL) 变为可用状态。如果并发性级别较高(例如当您的计算机有多个内核时),争用问题导致的瓶颈和性能损失可能会更明显。
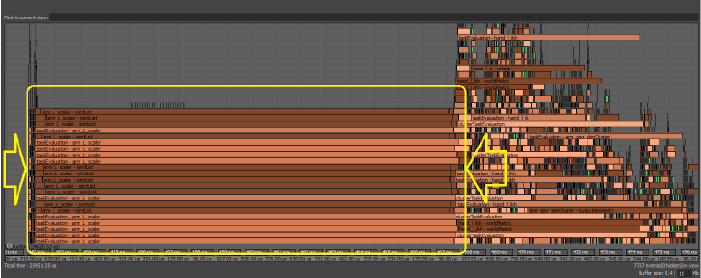
如果您遇到争用问题,请尝试修复受影响的代码。在上面的示例中,通过更改节点调度可将上面的分析示例转换为下面的示例,从中可以看出性能增益。因此,默认情况下,Python 插件被安排为“全局序列化”,这意味着它们将依次安排,并且不会阻止多个线程等待 GIL。
- 簇
- 如果“解算图”(Evaluation Graph)包含节点级别的循环依存关系,这些节点将分组到表示将串行安排的单个工作单位的“簇”。
- 虽然多个簇可以同时解算,但大型簇会限制可同时执行的工作量。可以使用 opaqueTaskEvaluation 标签在分析器(Profiler)中将簇标识为栏,如下图所示:
-
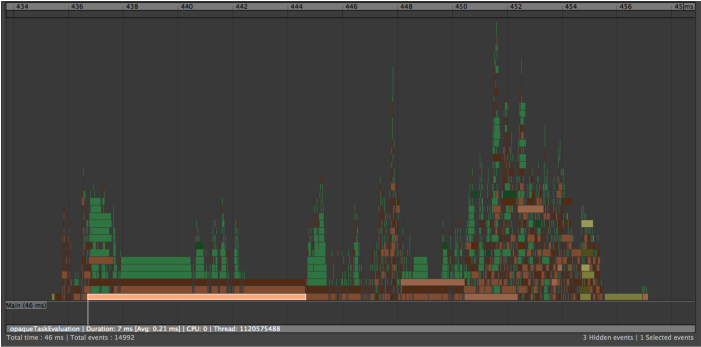
- 如果您的场景中包含簇,请分析绑定结构以找到任何圆形。理想情况下,请移除绑定零件之间的联接,以便独立解算各个绑定部分(例如,头部、身体等)。
提示: 对场景性能问题进行疑难解答时,使用解算工具包中每个节点的“冻结”属性禁用成本高昂的节点。这样可以从解算图中暂时移除特定节点,让您轻松了解是否已找到场景中的正确瓶颈。
渲染受限性能(Render-Bound Performance)
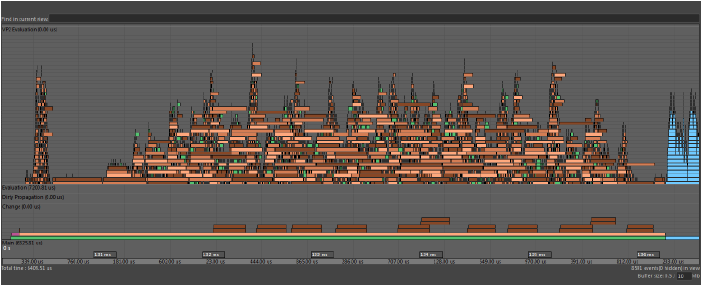
当场景中的主要瓶颈是渲染时,场景将被视为“渲染受限”。以下分析器(Profiler)示例已扩展为从具有许多动画网格的大型场景中获取的单个帧。由于对象数量、不同材质和几何体数量,该场景的渲染成本极高。
-
- 解算
- GPUOverridePostEval
- Vp2BuildRenderLists
- Vp2Draw3dBeautyPass
在此场景中,很多网格都使用“GPU 覆盖”(GPU Override)进行解算,因此某些分析器(Profiler)块的显示方式与原本有所不同。
- 解算
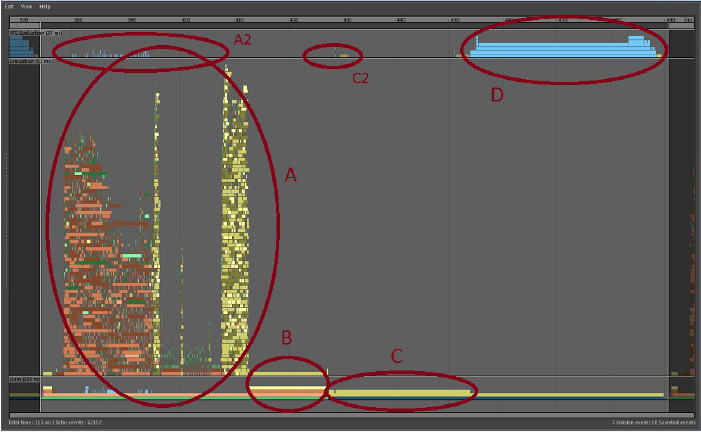
- 区域 A 显示计算 Maya 场景状态所花费的时间,在这种情况下,该时间将适度并行化。橙色和绿色着色块表示 DG 节点的软件解算。黄色块是通过“GPU 覆盖”(GPU Override)启动网格解算的任务。GPU 上的网格解算从黄色块开始,并与 CPU 上的其他工作同时继续。
- 场景解算中的并行瓶颈示例出现在解算部分中心的间隙中。右侧的大量“GPU 覆盖”(GPU Override)块依赖于场景的某个部分,必须等待其完成。
- 区域 A2(在区域 A 上方)为蓝色任务块,显示 VP2 与场景解算并行执行的工作。在此场景中,大部分网格工作均由“GPU 覆盖”(GPU Override)处理,因此它大部分为空。对软件网格进行解算时,此部分显示几何体缓冲区的渲染准备。
- GPUOverridePostEval
- “GPU 覆盖”(GPU Override)在区域 B 中完成某些工作。在此块中所花费的时间因 GPU 与驱动程序组合不同而有所不同。在某些时候,如果 GPU 负载过多,需等待 GPU 完成其解算。此时间可能会显示在此处,也可能表示在 Vp2BuildRenderLists 部分中花费的额外时间。
- Vp2BuildRenderLists
- 区域 C。一旦对场景进行解算,VP2 将生成要渲染的对象列表。此部分中的时间与场景中的对象数量成正比。
- Vp2PrepareToUpdate
- 此分析中的区域 C2 非常小。VP2 可保留内部副本并使用它来确定要在视口中绘制的内容。如果要渲染场景,我们必须确保 VP2 数据库中的对象已进行修改,以反映 Maya 场景中所做的更改。例如,对象变为可见还是隐藏、其位置或拓扑更改,等等。此操作由 VP2 Vp2PrepareToUpdate 完成。
- 只要出现形状拓扑、材质或对象可见性更改,Vp2PrepareToUpdate 速度将减缓。在此示例中,由于场景对象很少需要额外处理,Vp2PrepareToUpdate 几乎不可见。
- Vp2ParallelEvaluationTask 是可能会出现在此区域中的另一个分析器(Profiler)块。如果将时间花在此处,对象解算将从解算管理器的主要解算区域(区域 A)推迟,以便稍后进行解算。此部分中的解算使用传统的 DG 解算。
- 在并行解算过程中减缓 Vp2BuildRenderLists 或 Vp2PrepareToUpdate 的常见情况包括:
- 大量渲染对象(如该示例中所示)
- 网格拓扑更改
- 在渲染之前需要旧版解算的对象类型(如图像平面)
- 触发 API 回调的第三方插件
- Vp2Draw3dBeautyPass
- 区域 D。所有数据准备就绪后,将会渲染场景。此时会发生 OpenGL 或 DirectX 渲染。此区域被分成多个子区域,具体取决于视口效果,例如,深度剥离、透明度模式和屏幕空间抗锯齿。
- 如果您的场景存在以下情况,Vp2Draw3dBeautyPass 的速度可能会减缓:
- 要渲染很多对象(如本示例中所示)。
- 使用透明度:默认透明度算法降低了场景合并的效率,因此如果拥有大量透明对象,可能会导致速度很慢。对于超大量透明对象,将“透明度算法”(Transparency Algorithm)(在 VP2 设置中)设置为“深度剥离”(Depth Peeling)而非“对象排序”(Object Sorting)可能速度更快。您也可以切换到未上纹理模式以绕过此问题。
- 使用多个材质:在 VP2 中,对象在渲染之前按材质进行排序,因此如果具有很多不同材质,可能会使此过程耗时较长。
- 使用视口效果:很多效果需要额外处理,例如 SSAO(“屏幕空间环境光遮挡”(Screen Space Ambient Occlusion))、“景深”(Depth of Field)、“运动模糊”(Motion Blur)、“阴影贴图”(Shadow Maps)或“深度剥离”(Depth Peeling)。
- 其他考虑事项
- 尽管上述关键阶段适用于所有场景,但您的场景可能具有不同的性能特性。
- 对于动画有限的静态场景,或者对于非变形动画对象,请使用合并来提高性能。通过合并可以对共享相同材质的对象进行分组,并减少 Vp2BuildRenderLists 和 Vp2Draw3dBeatyPass 中所花费的时间,因为要渲染的对象较少。
保存和恢复分析
分析数据可以随时保存以供日后分析,方法是使用“分析器”(Profiler)窗口中的或(Edit > Save Recording of Selected Events...)。所有内容均保存为纯文本字符串数据,以便您可以从任何场景加载分析数据,方法是使用(Edit > Load Recording...),而无需加载已分析的场景。