Rotierende Bauteile
In der Analyse von rotierenden Bauteilen oder Festkörpern lassen sich bessere Prognosen erzielen, wenn das Strömungsfeld innerhalb des relativen Referenz-Frames (ein Referenz-Frame, der innerhalb des rotierenden Bauteils rotiert) berechnet wird. Um mehrere rotierende Bauteile abzudecken, die sich mit unterschiedlichen Drehzahlen und/oder Achsen drehen, ist es ratsam, einen rotierenden Bereich zu erstellen, der jedes rotierende Bauteil umgibt. Diese rotierende Bereiche werden dann von einem nicht rotierenden Bereich umgeben.
In der folgenden Skizze ist jedes rotierende Bauteil (in Rot angegeben) von einem kreisförmigen Fluidbereich (grün) umgeben. Der äußere, im Quader eingeschlossene Bereich ist ein feststehender Bereich.
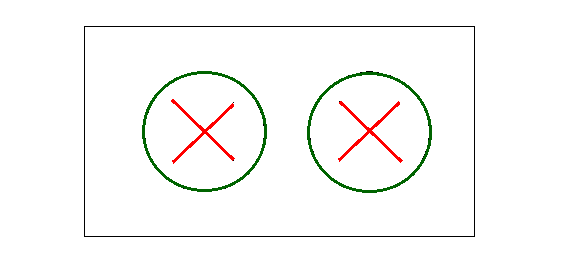
Diese Fluidbereiche rotieren mit derselben Winkelgeschwindigkeit wie das rotierende Bauteil, dass sie umgeben. Innerhalb der rotierenden Bereiche werden alle Berechnungen im relativen Referenz-Frame durchgeführt. Innerhalb der feststehenden Bereiche werden alle Berechnungen im Trägheits-Referenz-Frame durchgeführt.
Wenn die Fluidbewegung in einem relativen Frame berechnet wird, müssen einige zusätzliche Beschleunigungen in Betracht gezogen werden:
at = Tangentialbeschleunigung
acentrip = Zentripetalbeschleunigung
acoreolis = Coreolis-Beschleunigung
Dabei steht die Geschwindigkeit im Trägheits-Frame mit den Geschwindigkeiten im relativen verwendeten Frame in Beziehung,
Diese zusätzlichen Impulsbeschleunigungsquellparameter werden nur in den rotierenden Fluidbereichen benötigt.
Bei jeder Zeitebene drehen sich die rotierenden Komponenten und die umgebenden Fluidnetze um ein paar Grad. Bei einer bestimmten Drehzahl wird der Drehwinkel berechnet als
Dabei wird die Drehzahl in Umdrehungen pro Minute (1/min) angegeben. Wenn sich das rotierende Netz an seiner neuen Position befindet, werden alle skalaren Größen über die geometrische Interpolation zwischen den beiden Netzsystemen von der rotierenden Seite auf die nicht rotierende Seite der gleitenden Netzschnittstelle abgebildet. Die Informationen werden auf Advektionsbasis übertragen. Mit anderen Worten: Wenn jede fließende Seite auf der Rotor-Stator-Schnittstelle untersucht wird, advektiert die Strömung vom Rotor zum Stator Größen in Strömungsrichtung. In ähnlicher Weise werden durch die Strömung vom Stator zu Rotor Informationen vom feststehenden Netz zum rotierenden Netz übertragen. Bei der Verbindung des über den gleitenden Netzbereich übertragenen Moments ist der Vorgang sehr ähnlich, es sei denn, eine Transformation ist erforderlich, um die Größe "Omega mal r" zu addieren oder zu subtrahieren, wenn eine Transformation vom relativen zum absoluten Frame oder umgekehrt durchgeführt wird.
Wenn die Geschwindigkeit eines rotierenden Bauteils unbekannt ist, wird die Erhaltung des Drehimpulses verwendet, um die Winkelgeschwindigkeit über die Zeit zu prognostizieren.
In dieser Gleichung wird das rotierende Bauteil durch das hydraulische Drehmoment (das aus Druck- und Scherkräften entsteht, die auf die Flächen des rotierenden Bauteils wirken) und extern angewendete Drehmomente entweder beschleunigt oder verlangsamt. Die Trägheit des rotierenden Bauteils erhält das Symbol I. Beachten Sie, dass ein frei rotierendes Bauteil, auf das kein externes Drehmoment angewendet wurde, beschleunigt, bis das erzeugte hydraulische Drehmoment auf null zurückgeht.