The Wall Seek behavior uses a grid object to attract delegates. When influenced by the Wall Seek force, delegates turn until they're heading toward the grid. It's useful for moving objects toward a rectangular area, such as a doorway.
-
 Create panel >
Create panel >  (Helpers) > Object Type rollout > Crowd > Setup rollout > Behaviors group > Click the New button. > Select Behavior Type dialog > Wall Seek Behavior
(Helpers) > Object Type rollout > Crowd > Setup rollout > Behaviors group > Click the New button. > Select Behavior Type dialog > Wall Seek Behavior
-
Select a Crowd object. >
 Modify panel > Setup rollout > Behaviors group > Click the New button. > Select Behavior Type dialog > Wall Seek Behavior
Modify panel > Setup rollout > Behaviors group > Click the New button. > Select Behavior Type dialog > Wall Seek Behavior
-
Select a Crowd object. > Modify panel > Setup rollout > Behaviors group > Choose Wall Seek from the drop-down list.
You can set the grid to attract from either side or both sides, and optionally specify a maximum distance for attraction. You can also set the behavior to act as though the grid extends infinitely along its plane.
Interface
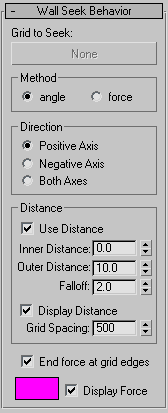
- Grid to Seek button
-
Set the target grid by clicking the button (initially labeled “None”) and then selecting the grid. Thereafter, the grid's name appears on the button.
Method group
Determines whether delegate direction as influenced by the behavior is calculated by an angular method or a force method.
- angle (The default.) Applies a force to the delegate based on the angle between the delegate's current direction and the direction it would need to take in order to be moving directly toward the target.
The magnitude of the force is greatest when the delegate is moving away from the target, and needs to turn around. It can be as little as 0 when the delegate is directly approaching the target.
- force Always applies a force directly towards the target. The magnitude of the force is constant.
Direction group
Determines whether the grid attracts from its positive-axis side, its negative-axis side, or both.
To determine which is the positive-axis side, select the grid, and then set the reference coordinate system to Local (the default system is View). Look at the grid in a viewport and check the direction of the Z-axis arrow. This arrow determines the positive-axis direction. The opposite direction is the negative-axis direction.
- Positive Axis The grid attracts only from the positive-axis side.
- Negative Axis The grid attracts only from the negative-axis side.
- Both Axes The grid attracts from both sides.
Distance group
Use the distance settings to activate the Wall Seek behavior only when the delegates are within a specific distance from the target. The relative strength of the behavior increases from 0 percent at the outer distance to 100 percent at the inner distance.
- Use Distance
- When on, the behavior applies only to delegates closer to the target than the Outer Distance value. Default=on.
Inner Distance The distance from the target at which the force is applied at full strength. Default=0.0.
Outer Distance The distance from the target at which the force begins to be applied. Default=10.0.
Falloff The rate at which the attracting force diminishes between the Inner Distance and the Outer Distance. Default=2.0.
A value of 1.0 indicates a linear falloff. Higher values cause the strength to fall off to zero more rapidly with distance, thus focusing its effect closer to the Inner Distance. Lower values reduce the rate of diminishment, with a Falloff setting of 0.0 indicating that the strength is the same at the Outer Distance as it is at the Inner Distance.
- Display Distance
- Shows the inner and outer distance settings as grids offset from the target grid in the viewports. The Inner Distance grid is light blue, while the Outer Distance grid is blue-white. Default=on.
Grid Spacing Alters the spacing of grid lines used to draw the Inner/Outer Distance grids. The lower the value, the closer the spacing. Default=500.
- End force at grid edges
- When on, the force emanates only from the grid object. When off, the force emanates from an imaginary infinite grid created by extending the grid plane in all directions.
- [seek force color swatch]
-
Shows the color used to draw the Seek force vector (and, if used, the radii) during the solution. Click the box to choose a different color. Default=violet.
Display Force When on, force exerted on the delegates by the Seek behavior is drawn in the viewports as a vector during the simulation solution. If Use Radii is turned on, the radii are also displayed when the force is active.