The spring IK solver (ikSpringSolver) produces proportional rotations across all joints. This is useful when posing and animating limbs that have numerous joints such as insect legs.

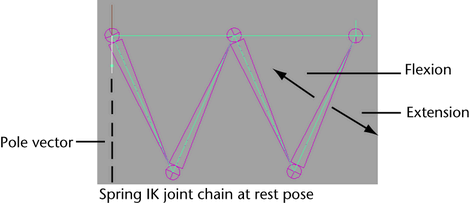
The spring IK solver keeps the angles between joints in its joint chain proportional by applying bias values to those angles. This ensures that the angles between all joints are always evenly distributed. The spring IK solver is similar to the rotate plane IK solver in that both their IK handles have pole vectors. Since the spring IK handle has a pole vector, flipping will occur if the spring IK joint chain crosses its pole vector.
An IK handle using the spring IK solver requires a rest pose. By default, the position and orientation of the target joint chain at the time of the spring IK handle’s creation is its rest pose. The distance between the first and last joint of a spring IK joint chain at its rest pose determines if the joint chain is flexed or extended, and influences each individual joint’s movement.