The following Chain IK constraint settings are found only in the Properties window:
First Joint
Use the Asset list to select a First Joint. The first node or the root of the IK chain. This is the same setting as the First Joint cell in the Chain IK constraint settings.
End Joint
Use the Asset list to select an End Joint, the last node in the IK chain. This is the same setting as the End Joint cell in the Chain IK constraint settings.
Effector
Use the Asset list to select an Effector, the object that the IK chain tries to reach. This is the same setting as the Effector cell in the Chain IK constraint settings.
Setup
Click the Setup button to re initialize the solver.
Solver Type
There are two solver types: ikRPSolver and ikSCSolver.
| Solver Type | Description |
|---|---|
| ikRP Solver | Lets you use and customize a Pole Vector. RP stands for “Rotation Plane”. Uses a Pole Vector or Pole Object to orient the chain. Scaling the effector object does not alter the constrained object. |
| ikSC Solver | Lets you adjust the orientation of the bone chain. SC stands for “Single Chain”. Uses the rotation of the effector to orient the chain instead of a Pole Vector or Pole Object. Scaling the effector object does not alter the constrained object. |
Twist
Lets you adjust the difference in orientation between the reference plane and the joint chain plane.
Pole Type
Lets you specify whether a specific vector or the position of the pole object computes the vector.
Pole Vector X/Y/Z
Lets you specify the absolute point in space at which the chain is aiming.
Pole Object
Use the Asset list to select a Pole Vector Object(s). This is the same setting as the Pole Vector Object cell in the Chain IK constraint settings.
Pole Offset X/Y/Z
Use this setting to offset the Pole relative to the Pole object’s position. You can use more than one Pole Vector object to create an offset. See Multiple Pole Vector objects.
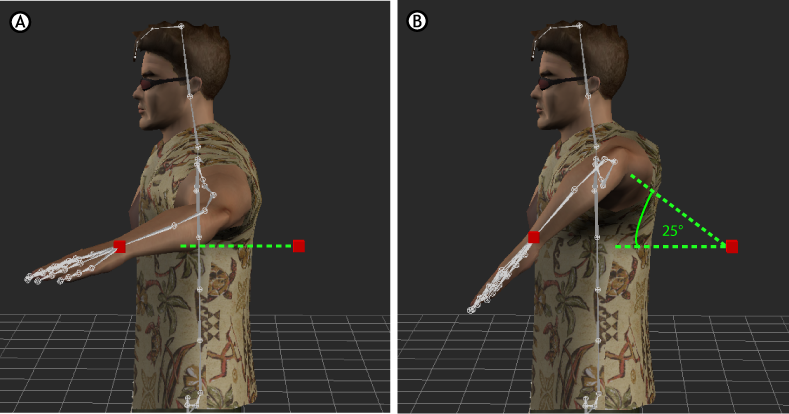
Pole Vector offset A. No offset B. Y-value offset to 25 degrees
Evaluate TS Anim menu
Lets you select a method for the Chain IK constraint to evaluate Translation and Scaling animation of each object in the chain.
Evaluating Translation and Scaling animation is done by pre-solving the IK chain at every frame, which causes significant delays in performance.
| Setting | Description |
|---|---|
| Never | Does not calculate translation or scaling animation on the chain. This method is fastest, and is recommended if you need the constraint only to calculate chain rotation or have a very complex chain. Select this option when there is no translation or scaling animation on any object in the chain, or you do not want the solver to take the translation and scaling animation into consideration. This provides you with consistent and fast CPU performance. If there is any Translation or Scaling animation on the nodes, the chain will not reach its effector. |
| Auto | Detects if there is Translation or Scaling animation and pre-solves it so that the chain always reaches its effector. This option is the default setting. By selecting this option, rendering performance may vary during playback depending the detection of Translation and Scaling animation. |
| Always | Always pre-solves the constraint so that the chain reaches its effector. Select this option to ensure consistent but slow, CPU performance. |
If you have a scene with many IK chains that have translation and scaling animation, you may want to use the Never setting while you work on another part of the scene to benefit from the increased performance, reserving the Always setting for when you play back the whole scene.
SourceObject.Weight
Use this setting to give different amounts of influence to pole vector objects.