Vous pouvez sélectionner dans la liste Système de coordonnées de référence le système de coordonnées devant être utilisé pour une transformation (Déplacement, Rotation et Mise à l'échelle). Les options comprennent Vue, Ecran, Univers Parent, Local, Gimbal, Grille, Courant et Choisir.
Dans le système de coordonnées Ecran, toutes les vues, dont les vues Perspective, utilisent les coordonnées de l'écran de la fenêtre.
Vue est un mélange des systèmes de coordonnées Univers et Ecran. Avec Vue, toutes les vues orthographiques utilisent le système de coordonnées Ecran, tandis que les vues Perspective utilisent le système de coordonnées Univers.
 Préférences Onglet Général Réf. Référence Zone Système Constante.
Préférences Onglet Général Réf. Référence Zone Système Constante.
Interface
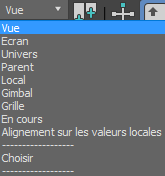
- Vue
-
Dans le système de coordonnées par défaut Vue, les axes X, Y et Z sont identiques dans toutes les fenêtres orthographiques. Lorsque vous déplacez un objet à l'aide de ce système de coordonnées, vous le déplacez par rapport à l'espace de la fenêtre.
- X est toujours orienté vers la droite.
- Y est toujours orienté vers le haut.
- Z est toujours orienté vers vous.
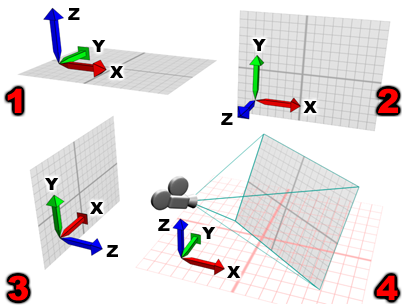
Différentes orientations du système de coordonnées Vue :
1. Fenêtre Dessus.
2. Fenêtre Face.
3. Fenêtre Gauche.
4. Fenêtre Perspective.
- Ecran
-
Utilise l'écran de la fenêtre active comme système de coordonnées.
- X est horizontal et est orienté vers la droite, dans une direction positive.
- Y est vertical et est orienté vers le haut dans une direction positive.
- Z correspond à la profondeur et est orienté dans une direction positive vers vous.
Etant donné que l'orientation en mode Ecran dépend de la fenêtre active, les noms X, Y, et Z d'un repère trois axes d'une fenêtre inactive indiquent l'orientation de la fenêtre active. Les étiquettes figurant sur ce repère trois axes changent lorsque vous activez la fenêtre dans laquelle il se trouve.
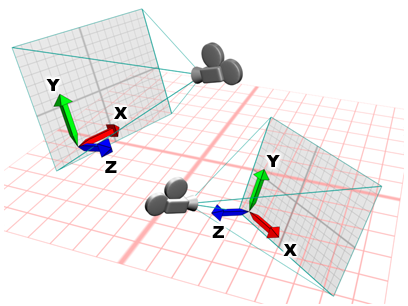
Le système de coordonnées en mode Ecran est toujours relatif au point de vue.
- Univers
-
Utilise le système de coordonnées universel. D’un point de vue avant :
- X est orienté dans une direction positive vers la droite.
- Z est orienté dans une direction positive vers le haut.
- Y est orienté dans une direction positive et s'éloigne de vous.
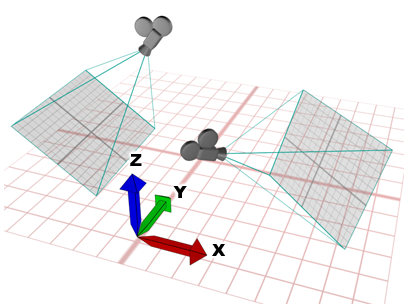
Le système de coordonnées Univers est toujours fixe.
Remarque : L'axe universel indique l'orientation actuelle de la fenêtre par rapport au système de coordonnées universel. Il se trouve dans l'angle inférieur gauche de chaque fenêtre. Les couleurs de l'axe universel sont le rouge pour l'axe X, le vert pour l'axe Y et le bleu pour l'axe Z. Vous pouvez désactiver l'affichage de l'axe universel dans toutes les fenêtres en désactivant l'option Afficher axe univers dans le groupe de fonctions Fenêtres de la boîte de dialogue Préférences.
L'axe universel indique l'orientation actuelle de la fenêtre.
- Parent
-
Utilise le système de coordonnées du parent de l'objet sélectionné. Si l'objet n’est lié à aucun objet spécifique, il s'agit d'un enfant de l'univers. Le système de coordonnées parent est donc identique au système de coordonnées universel.
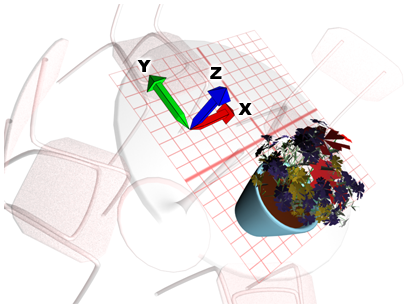
Exemple d'un système de coordonnées objet parent.
- Local
-
Utilise le système de coordonnées de l'objet sélectionné. Le système de coordonnées local d'un objet dépend de son point de pivot. Pour ajuster la position et l'orientation du système de coordonnées local par rapport à l'objet, utilisez les options du groupe de fonctions de commandes Hiérarchie.
Lorsque Local est activé, le bouton Utiliser centre coordonnées transformation est désactivé et toutes les transformations utilisent l'axe local comme centre de transformation. Dans un jeu de sélections composé de plusieurs objets, chacun de ceux-ci utilise son propre centre pour la transformation.
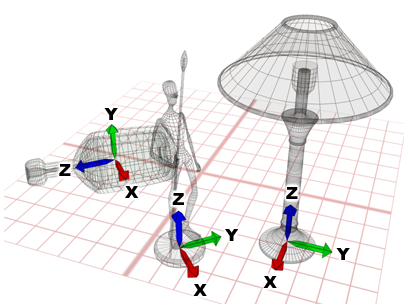
Local utilise un système de coordonnées individuel pour chaque objet.
- Gimbal
-
Le système de coordonnées Gimbal est destiné à être utilisé avec le contrôleur de rotation Euler XYZ. Il ressemble au système Local, mais ses trois axes de rotation ne sont pas nécessairement perpendiculaires les uns par rapport aux autres.
Lorsque vous effectuez la rotation autour d'un seul axe au moyen des systèmes de coordonnées Local et Parent, il est possible que deux ou trois pistes Euler XYZ soient modifiées. Le système de coordonnées Gimbal supprime ce problème : la rotation Euler XYZ autour d'un seul axe ne modifie que la piste de cet axe. L'édition de la courbe n'en est que plus facile. En outre, la saisie de transformation absolue avec les coordonnées Gimbal utilise les mêmes paramètres d'angle Euler que les pistes d'animation (par opposition aux angles Euler liés au système de coordonnées Univers ou Parent, lorsque ces systèmes de coordonnées sont requis).
Dans le cadre de transformations par déplacement ou modification d'échelle, les coordonnées Gimbal sont identiques aux coordonnées Parent. Si aucun contrôleur de rotation Euler XYZ n'est affecté à l'objet, la rotation Gimbal est identique à la rotation Parent.
En outre, le contrôleur Euler XYZ peut également être le contrôleur actif dans un contrôleur de liste.
- Grille
-
Utilise le système de coordonnées de la grille active.
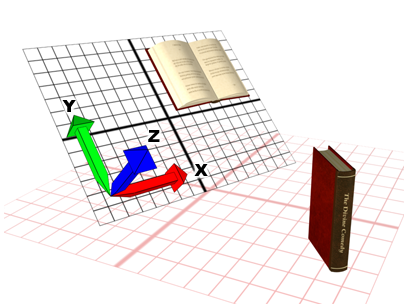
Utilisation d'un système de coordonnées de grille active.
- Courant
-
Utilise le système de coordonnées du pivot courant. Vous pouvez utiliser ce système de coordonnées n'importe quand, que le pivot courant soit actif ou non. Lorsque l'option Utiliser le pivot actuel est activée, il s'agit du système de coordonnées par défaut.
- Aligné sur les valeurs locales
-
Lorsque vous utilisez des sous-objets dans un maillage ou un poly éditable, Local prend uniquement en compte l'axe Z, ce qui génère des transformations imprévisibles le long des axes X et Y. L'option Aligné sur les valeurs locales utilise le système de coordonnées de l'objet sélectionné pour calculer les axes X et Y, en plus de l'axe Z. Cette option peut être utile pour ajuster en même temps plusieurs sous-objets dotés de faces différentes.
- Choisir
-
Utilise le système de coordonnées d'un autre objet de la scène.
Lorsque vous sélectionnez Choisir, cliquez pour sélectionner l'objet dont le système de coordonnées sera utilisé par les transformations. Le nom de l'objet apparaît désormais dans la liste des systèmes de coordonnées de transformation.
Etant donné que 3ds Max enregistre un nom d'objet dans la liste, vous pouvez choisir le système de coordonnées d'un objet, modifier le système de coordonnées actif, puis utiliser ultérieurement le système de coordonnées de cet objet. Cette liste contient les noms des quatre derniers objets sélectionnés.
Pour définir un objet comme système de coordonnées de référence à l'aide de la commande Choisir, vous pouvez appuyer sur H afin d'afficher la boîte de dialogue Choisir objet, qui fonctionne de la même manière que la boîte de dialogue Sélectionner dans la scène, et d'y choisir l'objet.
Remarque : Vous pouvez choisir des objets comme système de référence des coordonnées dans une scène Xréf.
Utilisation d'un autre objet en tant que système de coordonnées.