最初のプーリが駆動プーリとみなされます。残りのプーリは、被駆動プーリかアイドラーです。入力動力は、各プーリ動力比係数を用いて複数の被駆動プーリ間で分割できます。それに応じて力とトルクが計算されます。
接触円弧補正係数 c 1
接触弧が 180 度ではない場合、接触弧補正係数はプーリの V ベルト定格動力を補正します。補正係数のサイズは次の式から求められます。
稼動係数 c 2
稼働係数は、一日の稼動期間と、駆動ユニットおよび被駆動機械のタイプを考慮に入れます。稼働係数は伝動する動力を補正します。また、高始動トルクや高始動頻度、高動的荷重や高加速度の駆動の場合、稼動係数を増加させることを検討してください。
ベルト長さ補正係数 c 3
ベルト長さ補正係数は、基準ベルト長さと異なる場合、ベルト定格動力の補正を考慮に入れます。値はベルト製造メーカーが定め、ベルトのデータファイルに記載されています。ベルト基準長さでは、長さ補正係数の値は 1.0 で、結果に影響は与えません。
ベルト数補正係数 c 4
ベルト数補正係数は、複数の V ベルトを使用してる場合、複数の伝動ベルト間の荷重分散の差を考慮に入れます。ベルト当たりの荷重の差は、ベルトの長さや軸の変形が原因で生じます。内蔵している近似値のテーブルを基にして、係数が V ベルトの定格動力を補正します。テーブルに記載されていない値は線形補間を利用して計算します。
|
z |
1 |
3 |
6 |
999 |
|
c 4 |
1 |
0.95 |
0.9 |
0.85 |
プーリ数補正係数 c 5
この係数はベルト定格動力を補正します。これはプーリやアイドラーを足した際に生じる追加曲げ応力の負荷を考慮に入れます。1 つ(または複数)のアイドラーを使用すると、ベルトのパフォーマンスに影響するので、ベルト定格動力を減少させます。
一般的にアイドラーは、一定中間距離、コーナー曲がり、長距離の分割など、ベルトの振動が問題になったり、引っ張りを維持したり、連動機として使用したりする場合などで持ち上げるために用いられます。できるだけアイドラーは使用しないことをお勧めします。駆動で必要な場合、アイドラーの寸法と位置は、ベルトの寿命減少が最小になるよう設計してください。内側のアイドラーは少なくとも、最小の伝動プーリと同じくらいの大きさにすべきでしょう。
外側のアイドラーは、最小の伝動プーリより少なくとも 50% 以上大きくすべきでしょう。
プーリ数補正係数は既定で次に示すような内蔵の近似値テーブルに基づいて決められます。テーブルに記載されていない値は線形補間を利用して計算します。
|
k |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
100 |
|
c 5 |
1 |
0.91 |
0.86 |
0.81 |
0.78 |
0.76 |
0.75 |
0.7 |
張力係数 k 1
張力係数でベルト取り付け時の初期張力を調整できます。ベルト製造元によって推奨事項が定められています。これらの推奨事項に基づいてベルトが張られていないと、ベルトの定格馬力が正しく決定されないことがあります。取り付け張力は、効率、ベルト スリップ、および稼動期間に大きく影響します。通常はベルト張力係数として 1.0 から 1.5 が使用されますが、これは決定的な基準値です。
ベルト張力が不十分だと適切に伝動されず、ベルトのスリップによる効率低下と早期のベルト損傷を招きます。
ベルト張力が過剰な場合、表面圧力が増加、交差して曲がる危険、曲げ応力の増加、引っ張りメンバの過労が生じ、結果として早期に破損したり伸びたりします。
適正なベルト張力とは、通常の負荷状態でベルトがスリップしないような張力です。
有効トルク係数 η t
この係数は、ベルト伝動の品質レベルを示します。出力トルクの低下につながるエネルギーの損失を考慮します。ベルトの変形エネルギー、溝での風の乱流などの要因が発生します。ここにはベルトのスリップによって発生する動力の損失は含まれず、ジェネレータによって別途決定されます。これら 2 つの要因の組み合わせの結果が、最終的なベルト駆動有効性になります。
ベルト スリップとベルト駆動全体の効率 η

ベルト駆動係数は最も信頼度のないプーリで決定します。
![]()
ベルト スリップは内蔵のスリップ テーブルで求めます。
被駆動プーリ速度
![]()
被駆動プーリ出力動力
P i = P xi F p v η t (1 - s)
![]()
内蔵スリップ テーブル
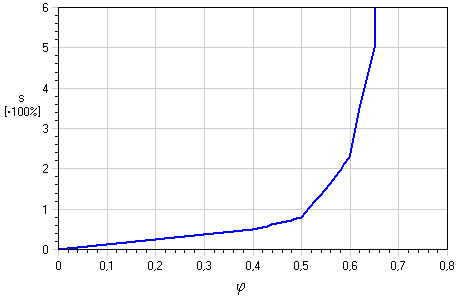
次のように仮定しています。
- ベルト スリップは駆動プーリで発生するため、すべての被駆動プーリおよびアイドラーの速度は、1 つの同じスリップの影響を受けます。
- スリップによるベルト速度の変化は無視されます。通常のベルト スリップの大きさは 1% から 2% なので、s = 0,01 から 0,02 となります。
伝達比
V ベルト ジェネレータの動力比は、各駆動プーリおよびアイドラーについて決定されます。特定の意味を持つ 3 種類の動力比があります。
|
i D |
[-] |
指定のプーリの望ましい動力比(速度比)。この比率は、プーリ サイズの設計ガイドとして使用されます。V ベルト ジェネレータが望ましい伝達比を達成する最も近いプーリ直径を見つけられるように、この比率を設定します。 |
|
i T |
[-] |
指定のプーリの最適動力比(速度比)。この比率は、正確な値としてプーリ直径から直接計算されます。ベルト スリップは考慮されません。 |
|
i |
[-] |
指定のプーリの動力比(速度比)。この比率はベルト スリップを考慮して計算されます。この値は、最大荷重時におけるプーリの最も近い動力比として使用します。指定のプーリの動力および軸速度は、この比率を使用して決定されます。 |
ベルト速度で摩擦を修正 f mod
ベルト速度で摩擦を修正する係数は、摩擦係数がベルト速度とともにどの程度変化するか示しています。摩擦修正係数が 0 の場合、摩擦係数に影響はありません。
結果の稼動係数 c PR
結果のサービス係数は次の式から求められます。指定トランスミッション レイアウトのベルト定格動力は、伝達する動力と比較されます。結果のサービス係数で、ベルト駆動装置がどの程度、設計とずれているか素早く確認できます。
![]()
|
c PR < c 2 |
強度チェック失敗 |
|
c PR ≥ c 2 |
強度チェック成功 |
|
c PR > c 2 |
トランスミッション レイアウトの変更を検討してください。違うベルトを用いるか、ベルト幅を小さくします。 |
使用される変数の意味:
|
β |
接触弧[度] |
|
F p |
有効張力[N] |
|
n 1 |
駆動プーリの速度[rpm] |
|
n i |
指定の被駆動プーリの速度[rpm] |
|
i |
指定のプーリの伝達比(速度比) [-] |
|
s |
ベルト スリップ[-] |
|
P x |
指定のプーリの動力比[-] |
|
P R |
ベルト定格動力、1 つのベルトによって伝達可能な動力[W] |
|
v |
ベルト速度[m/s] |
|
η t |
有効トルク係数[-] |
|
P |
伝達する動力[W] |
|
z |
ベルト数[-] |