このセクションでは、Inventor での基本的な Intent のワークフローをいくつか示します。動的ルール リアクタに関連するものは示されませんが、それが使用するパーツに習熟するために、それを通して見た方がよいでしょう。
リンクを作成およびアダプトする
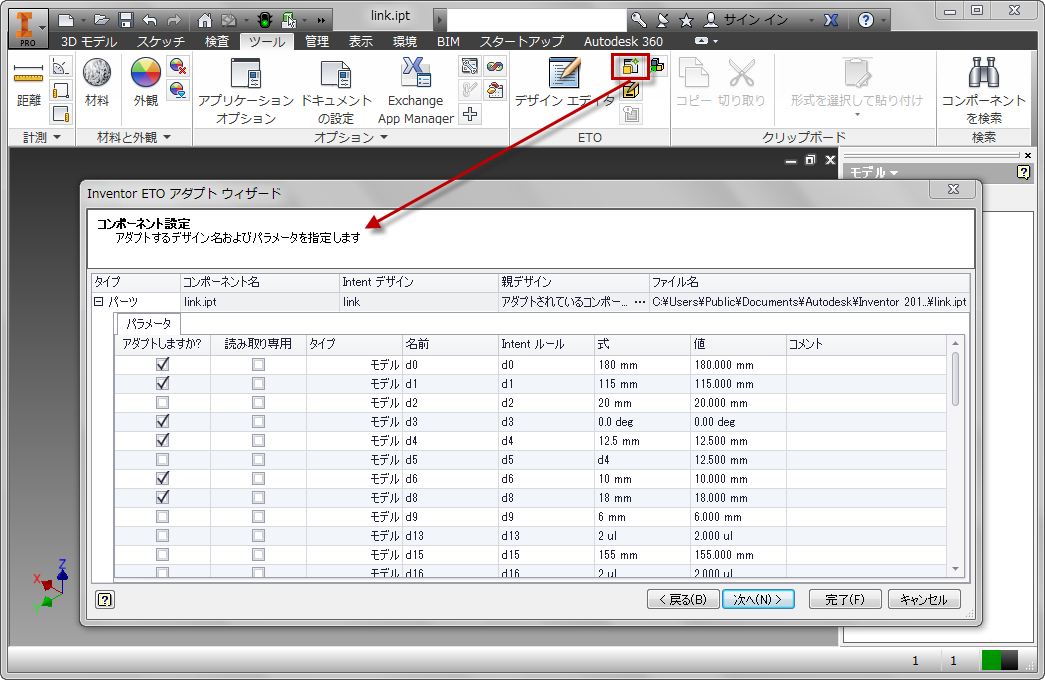
単純なパーツ(まだ Intent ではない)を使用して開始します。 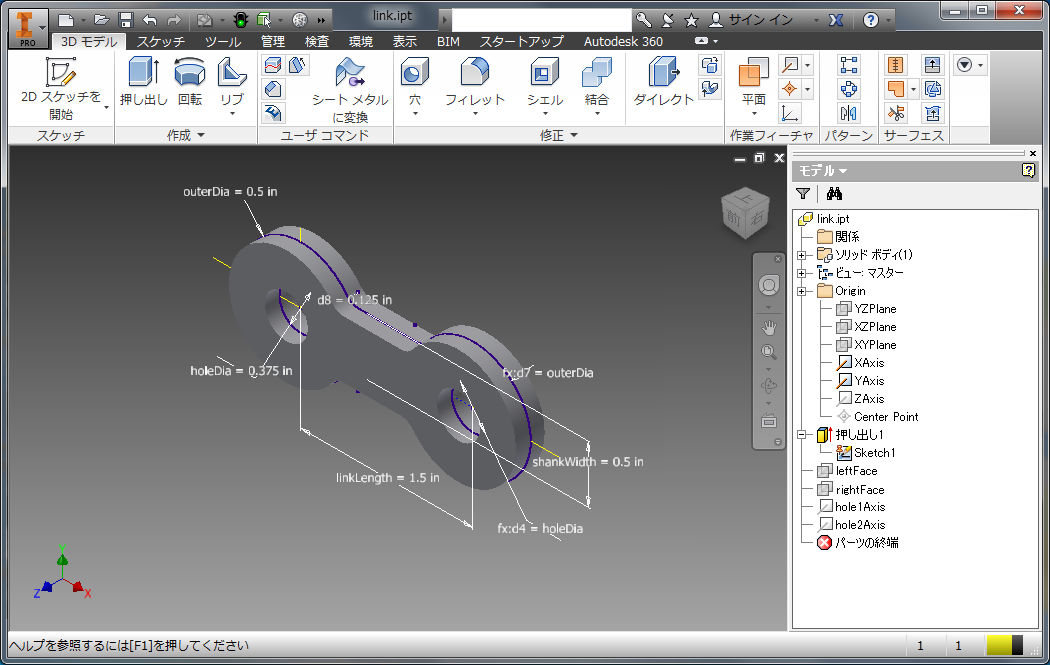
パラメータ名が有効であることを確認します。 
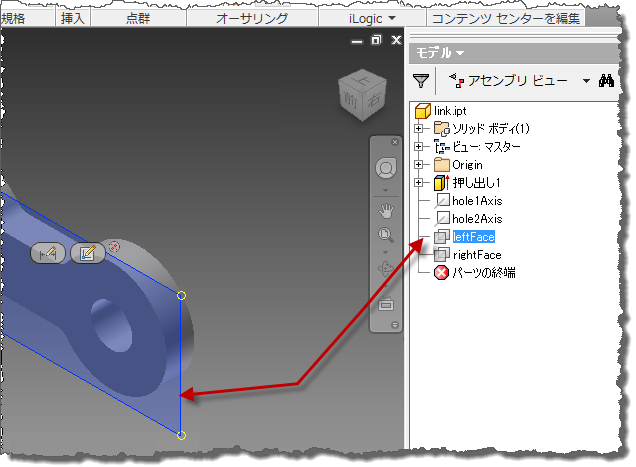
必要な作業フィーチャを追加し、それらを名前変更し、次に表示設定をオフにします。 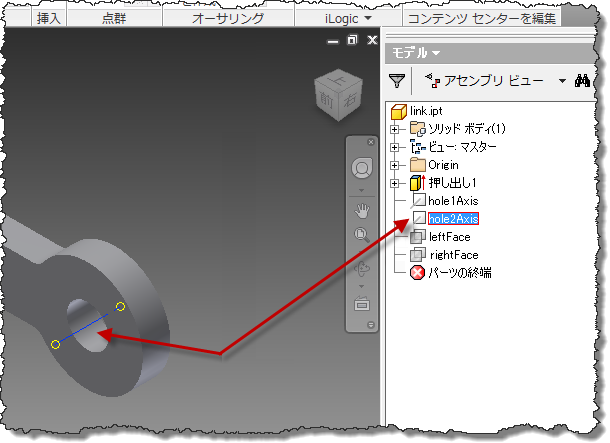
パーツを保存し、次にそれをアダプトします。
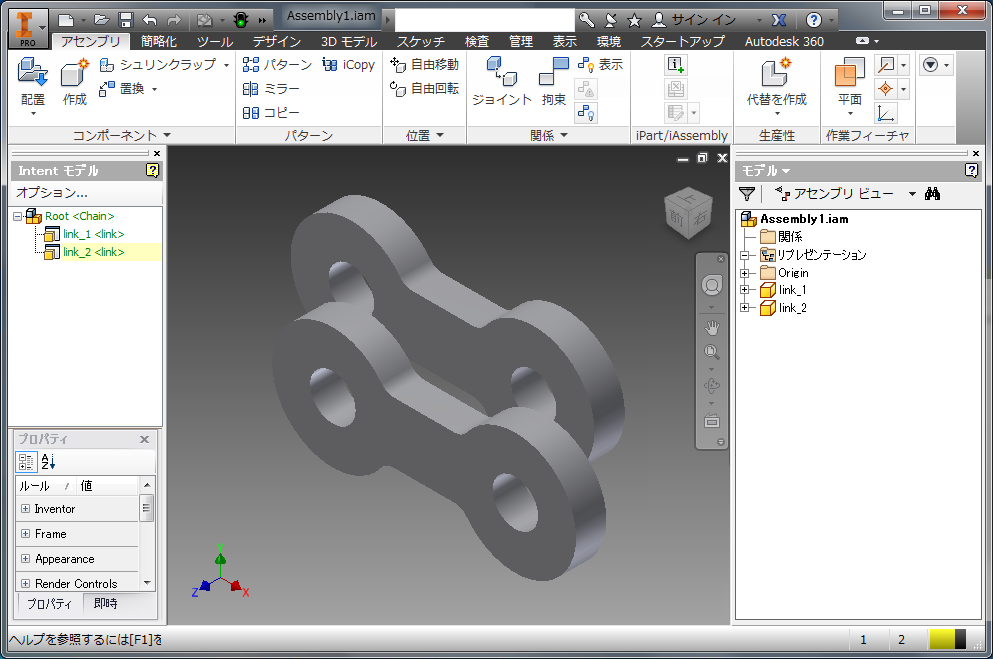
チェーン アセンブリを作成する
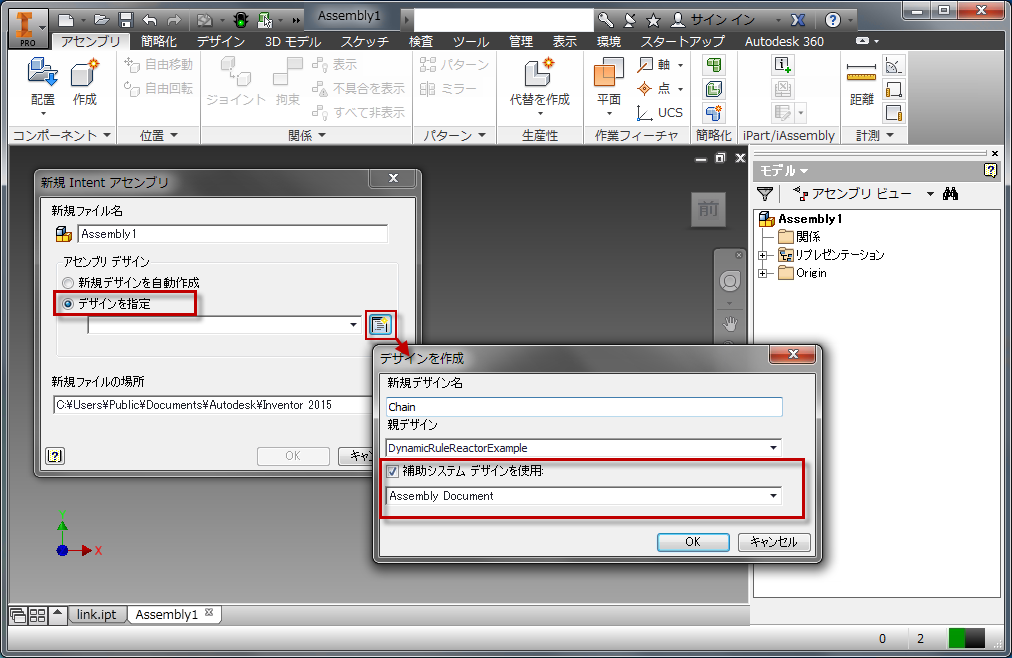
ここでアダプトされたリンクと円柱プリミティブを使用してチェーンをアセンブルします。新しいルート デザインで新しい Intent アセンブリを作成することにより開始します。
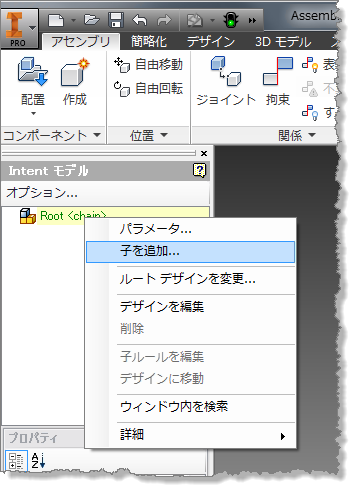
作成したアセンブリを使用し、新しいチェーン デザインを編集して次のパラメータ ルールを追加します。
Design Chain : DynamicRuleReactorExampleRoot IvAssemblyDocument Parameter Rule linkHoleDia As Number = 0.375 Parameter Rule linkThickness As Number = 0.250
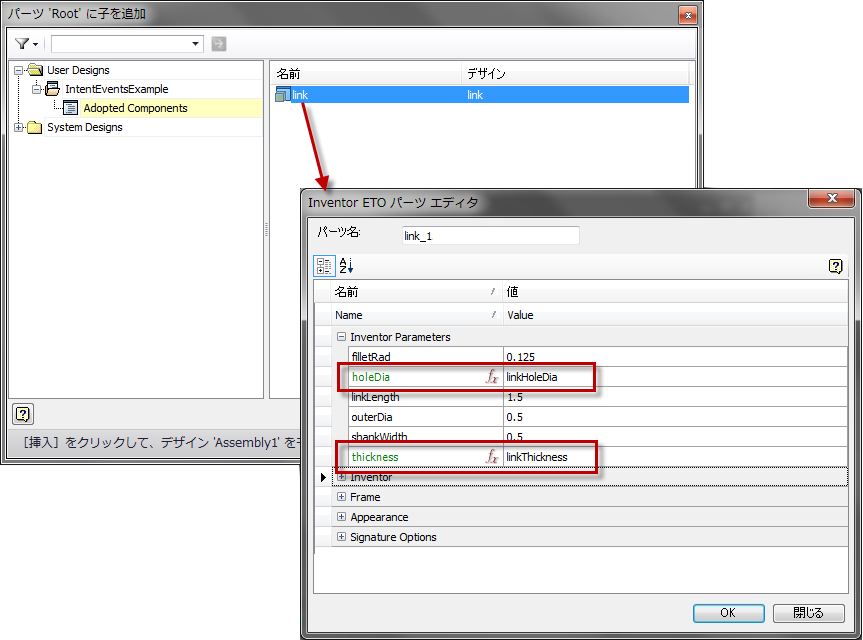
デザインを保存した後、Inventor でアセンブリにリンクを追加します。
上で追加した 2 つのアセンブリ パラメータに holeDia と厚さを設定します。
2 つ目のリンクを追加するには、このプロセスを繰り返します。
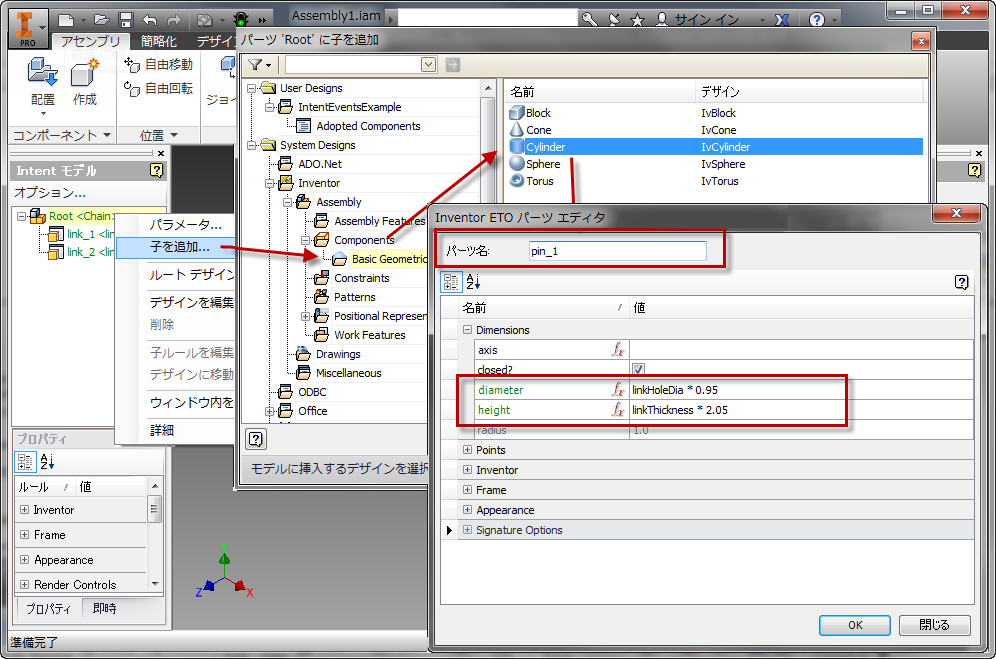
ここでは、ピンに対して使用する円柱の子を追加します。linkHoleDia よりも小さい直径、および linkThickness よりも 2 倍以上高さを設定します。
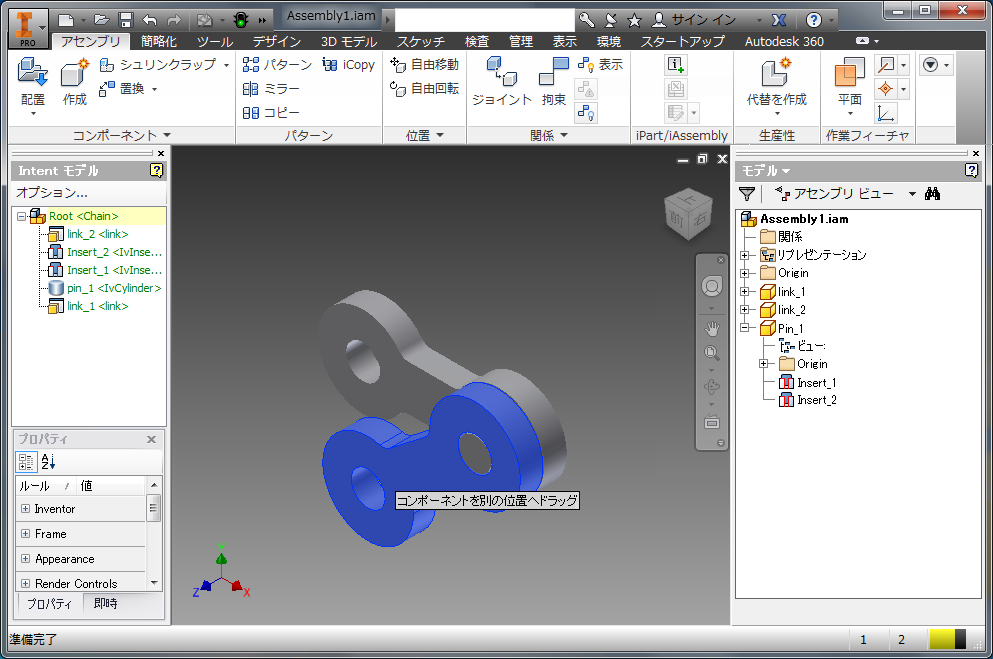
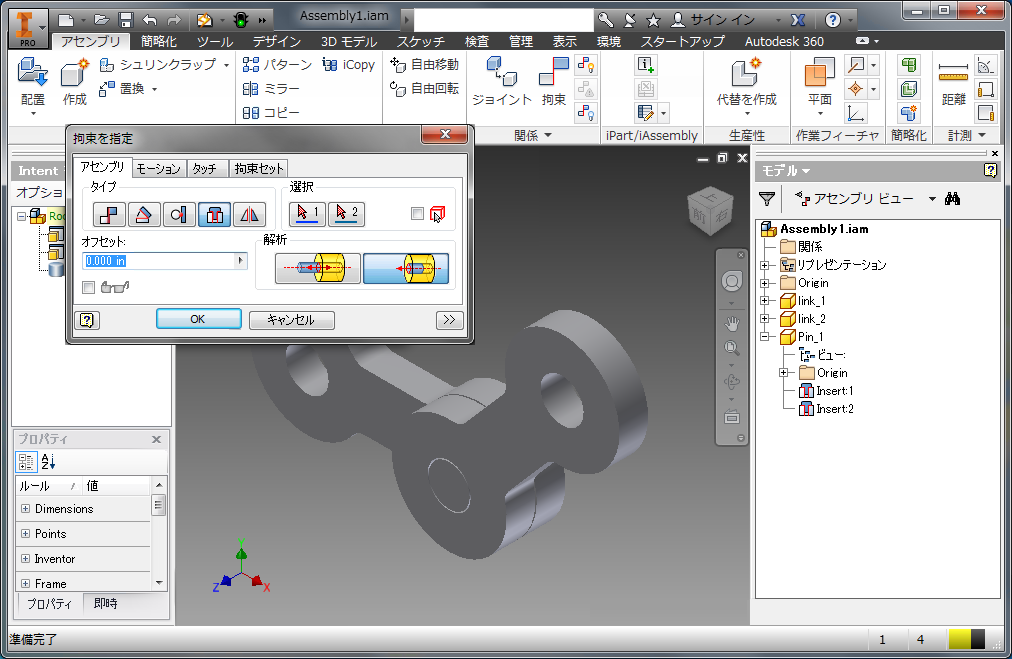
モデルのピンおよび 2 つのリンクを使用し、Inventor の 2 つの挿入拘束でピンとリンクを拘束します。
最後に、段階的に拘束をアダプトします。最初のアダプト後にモデルを保存することを忘れないでください。
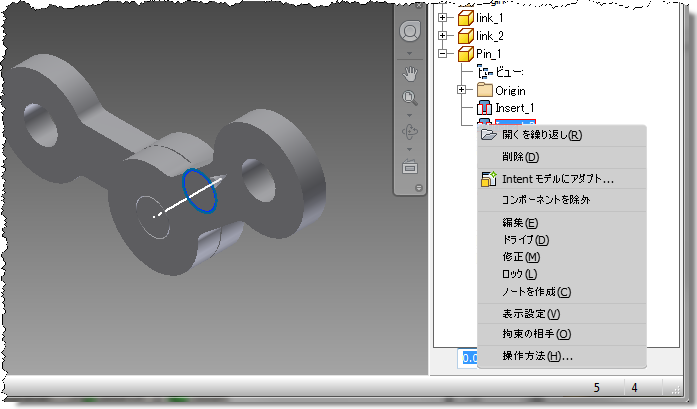
完了後、リンクをドラッグして、拘束をデモすることができます。