Veja a seguir comentários sobre a geração do tipo de conexão da base da coluna nas seguintes situações.
Cargas – Uma base de coluna com apoios definidos
O Robot lê as reações de apoio de uma coluna. Se um sistema local da placa de base não coincidir com as direções fixadas pelo apoio (veja as reações R1 e R2 na Fig. 3), as reações de apoio serão transformadas no sistema local da placa de base (reações Rh e Rv na Fig. 3). Isso resulta da suposição de que a placa de base é sempre perpendicular ao pilar da coluna. Portanto, o conjunto transformado de forças é usado para os cálculos.
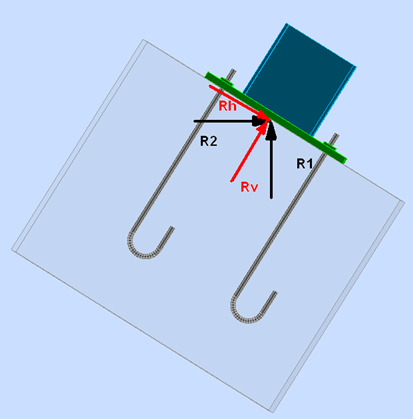
Fig. 3 Transformação das reações de apoio (R1, R2) para o sistema local da placa de base (Rh, Rv).
Cargas – Uma base de coluna suportada em outros elementos da estrutura
Se não houver apoio definido em um nó, o Robot analisará todos os elementos adjacentes ao nó e posicionados acima da placa de base, no lado do pilar da coluna. Em seguida, ele calculará o conjunto resultante de todas as forças internas desses elementos, considerando também as forças concentradas e os momentos aplicados ao nó analisado. Portanto, a força resultante calculada será transformada no sistema local da placa de base.
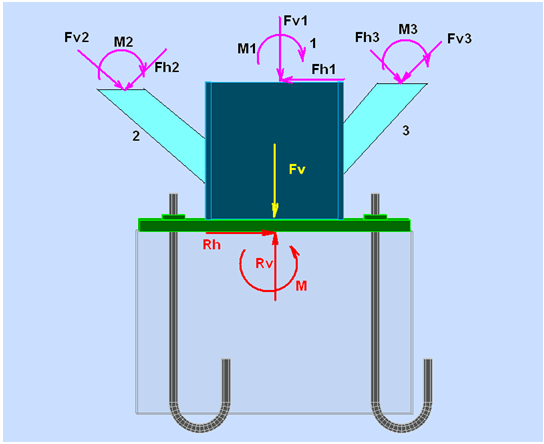
Fig. 4 Todas as forças internas (Fvi, Fhi, Mi) e forças concentradas (como Fv) são adicionadas e os resultantes correspondentes dessas forças são transformados para o sistema local da placa de base (Rh, Rv, M).
Presume-se que a base da coluna seja carregada por todos os elementos acima da placa de base (1, 2 e 3 na Fig. 5), enquanto os elementos posicionados no plano da placa de base ou abaixo são ignorados.
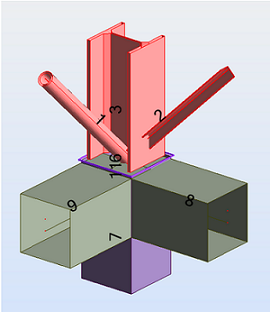
Fig. 5 A base da coluna é carregada por elementos: 1, 2 e 3, e é suportada por elementos: 7, 8 e 9.
Criação Automática
O Robot gera uma base de coluna automaticamente nos dois casos a seguir:
- Se você selecionou somente um elemento suportado e o nó em que a base da coluna deve ser definida (independentemente de um apoio nesse nó estar ou não definido) – veja a Fig. 6
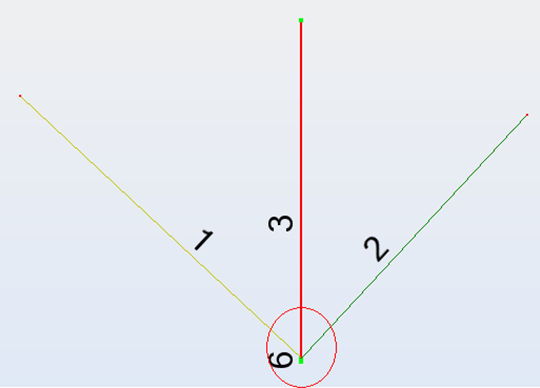
Fig. 6 A barra e o nó são selecionados – o Robot gerará uma base de coluna.
Nota: A exceção é quando um nó selecionado é uma extremidade não suportada do balanço (outros elementos de barra não se unem a esse nó). Em seguida, a base da coluna não será gerada (consulte Fig. 7).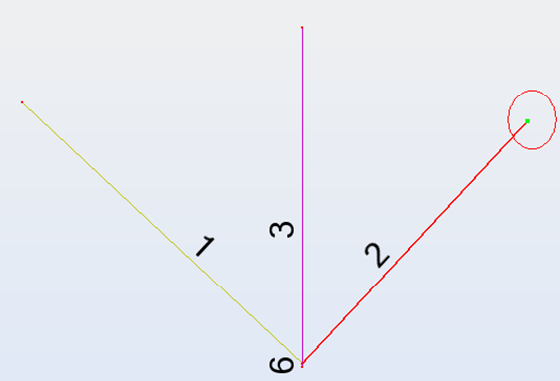
Fig. 7 Uma extremidade não suportada – a base da coluna não será gerada.
- Se vários membros se unirem a um nó e somente um deles for de aço, enquanto os restantes são de outros materiais, como na Fig. 8, a base da coluna será gerada automaticamente para o membro de aço.
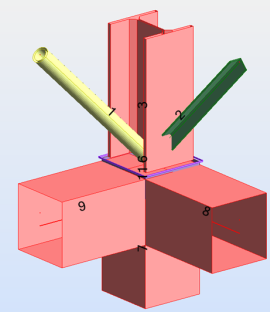
Fig. 8 O membro 3 é o único elemento de aço; os membros 7, 8 e 9 são elementos de CA; a base da coluna será gerada para o membro 3.