Промежуточные ведущие кривые используются для контроля положения сегментов траектории. Область обработки не затрагивается. Лучше всего это показано на примере.
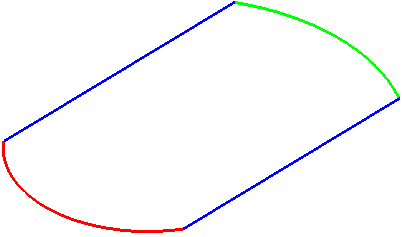
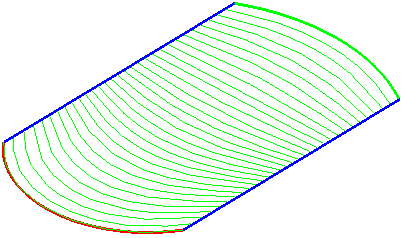
В этом примере используются две ведущие кривые и две ограничивающие кривые, но нет промежуточных ведущих кривых:
и генерируется такая траектория:
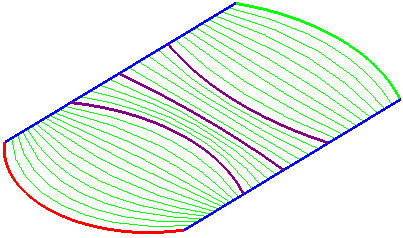
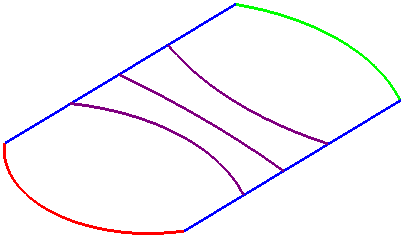
В этом примере используются две ведущие кривые, две ограничивающие кривые и три промежуточные ведущие кривые:
и генерируется такая траектория: