在反向运动学中,操作关节的方法是在一根或更多的轴上允许运动,在其余的轴上限制运动。在“关节”卷展栏中,使用“激活”复选框,可以设置对象是否能围绕给定的轴移动(滑动)或旋转。关节最多可能有六根轴:三根位置轴,三根旋转轴。通过设置轴活动的轴,就可以限制关节的运动。
-
进行选择。 >
 “层次”面板 > “IK” > “滑动关节”和“转动关节”卷展栏
“层次”面板 > “IK” > “滑动关节”和“转动关节”卷展栏
对 IK 关节轴所进行的设置,会覆盖链接信息中的任何“继承”和“锁定”设置。
过程
要激活或取消激活轴,请执行以下操作:
-
 选择对象。
选择对象。 - 在 “层次”面板上,单击“IK”。
- 展开关节类型卷展栏。
- 对于任何可用的轴,启用“活动”。
- 启用此选项后,轴变为活动状态,对象可以沿它移动和旋转。
- 禁用此选项后,轴变为非活动状态,对象不能沿它移动或旋转。
要限制关节,请执行以下操作:
- 选择对象。
- 在 “层次”面板上,单击“IK”。
- 对于任何活动轴,启用“限制”。如果轴处于非活动状态,那么忽略限制设置。
- 启用此选项后,限制了轴,对象就在设置范围内移动或转动,运动范围由“从”和“到”字段设置。
- 禁用此选项后,轴变为非限制状态,对象可以沿轴自由移动或旋转。启用“限制”后,需要在“从”和“到”字段中指定限制值。当设置限制时,对象会变换到由“从”和“到”所定义的位置或旋转上。当离开字段,或释放微调器时,对象会返回到它原来的位置上。还可以在视口中查看关节限制,方法是在限制字段的“从”或“到”标签上,按住鼠标按钮。对象会移动或旋转到限制值,直到松开鼠标按钮。
界面
“滑动关节”/“转动关节”卷展栏
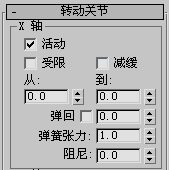
“滑动关节”卷展栏和“转动关节”卷展栏分别对应于位置和旋转,含有类似的控件。另外,每个卷展栏包含有相同的组框,来控制 X、Y 和 Z 轴。
“X/Y/Z 轴”组
- 活动
- 激活某个轴 (X/Y/Z)。允许选定的对象在激活的轴上滑动,或沿着它旋转。
- 受限
- 限制活动轴上所允许的运动或旋转范围。与“从”和“到”微调器共同使用。多数关节沿着活动轴所做的运动,有它们的限制范围。例如,活塞只能在汽缸的长度范围之内滑动。
- 减缓
- 当关节接近“从”和“到”限制时,使它抗拒运动。用来模拟有机关节,或者旧机械关节,它们在运动的中间范围移动或转动时是自由的,但是在范围的末端,却无法很自由地运动。
- “从”和“到”微调器
- 确定位置和旋转限制。与“限制”功能共同使用。
- 弹回
- 激活弹回功能。每个关节都有停止位置。关节离停止位置越远,就会有越大的力量,将关节向它的停止位置拉,像有弹簧一样。
- 弹回(微调器)
- 设置关节的停止位置。对于转动关节,这是关节的方向,用度衡量;对于滑动关节,它是位置,用单位衡量。调整这个的方法与调整“从/到”微调器类似。当进行调整时,可以看到方向/位置,但是当释放微调器时,对象会回到原来的状态。
如果正在使用“HD 解算器”,那么就必须启用“显示初始状态”(“运动”面板
 “IK 控制器参数”卷展栏),才能在调整期间看到几何体上的效果。
“IK 控制器参数”卷展栏),才能在调整期间看到几何体上的效果。 - 弹簧张力
- 设置“弹簧”的强度。当关节远离平衡位置时,这个值越大,弹簧的拉力就越大。设置为 0 会禁用弹簧;非常高的设置值会把关节限制住,因为弹簧弹力太强,关节不会移动过某个点,只能达到那个点范围之内的点。
- 阻尼
- 在关节运动或旋转的整个范围中,应用阻力。用来模拟关节摩擦或惯性的自然效果。当关节受腐蚀、干燥或受重压时,它会在活动轴方向抗拒运动。