“子对象->父对象”优先级使最靠近应用力的位置(终端感应器)的关节比距离力较远的关节移动的距离大。和默认优先级一样,“子对象->父对象”优先级实现适合许多 IK 解决方案的自然效果。
区别是“子对象->父对象”优先级为运动学链中的每个对象指定唯一的值(默认优先级为每个对象使用值 0)。如果您希望返回并手动更改优先级的值,“子对象->父对象”优先级更灵活。
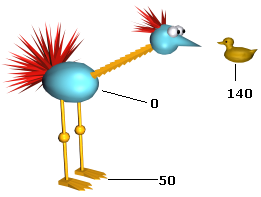
第一个图显示子对象至父对象优先级的值。
第一个图显示子对象至父对象优先级的值。
指定子对象->父对象优先级
单击“子对象->父对象”,基于优先级高于其父对象优先级的子对象来设置关节优先级。通过将整个层次的根优先级值设置为 0,并将每个子对象的值设置为 10 乘以从根开始的深度,来计算各个值。
几乎总是将“子对象->父对象”优先级指定给整个运动学链。图中的结构链使用身体作为根对象,使用鸭子作为终端感应器。
每个对象收到的值均等于它相对于层次根的深度乘以 10。请注意,无论是否将层次的根选为运动链的一部分,优先级值的计算均基于层次的根。
您可能希望仅为运动学链中的单个对象指定“子对象->父对象”优先级。例如,如果一直手动更改优先级的值,您可能希望将对象设置为其原始的“子对象->父对象”值。为对象指定的值等于从层次根开始的深度乘以 10。