摄影机点可以确定背景上的位置。它们可与摄影机跟踪器和摄影机匹配实用程序搭配使用。
-
 “创建”面板 >
“创建”面板 >  (辅助对象) > “摄影机匹配” > “对象类型”卷展栏 > “摄影机点”
(辅助对象) > “摄影机匹配” > “对象类型”卷展栏 > “摄影机点”
“摄影机跟踪器”和“摄影机匹配”实用工具使用“摄影机点”辅助对象在摄影机中重新生成与现实世界摄影机拍摄背景图像所使用的设置(位置、滚转和 FOV)相同的设置。从而允许您通过与背景图像相同的透视查看场景,在合成取景中将计算机生成的和摄影技术生成的图像混合起来是关键的一步。
放置在场景中的摄影机点对象将在背景照片中可见。通过将若干摄影机点对象的 X/Y/Z 位置与其在背景图像中相似的位置作比较,“摄影机匹配”工具可以确定真实世界摄影机的设置,然后使用这些设置创建新摄影机或移动/重置现有摄影机来匹配他们。
单击“摄影机点”以显示“键盘输入和“摄影机匹配点”卷展栏,这样可以创建和命名摄影机点。
过程
要创建摄影机匹配点,请执行以下操作:
- 在 “创建面板”上,单击 (辅助对象)。
- 从下拉列表中选择“摄影机匹配”,然后在“对象类型”卷展栏上启用“摄影机点”。
现在准备创建摄影机点。
- 在视口中单击以创建“摄影机点”辅助对象。或者,通过展开“键盘输入”卷展栏使用键盘创建“摄影机点”对象,在字段中输入值,然后单击“创建”。
要在场景中定位摄影机匹配点,请执行下列操作之一:
- 使用键盘输入创建摄影机匹配点。如果已精确实际测量了点的位置,请使用此选项。
- 构建与场景几何体相匹配的几何体,然后使用捕捉将点捕捉到几何体。不进行测量时可以采用此技术,并可以捕捉到近似几何体。
- 创建与点交互式匹配的摄影机,然后使用“变换输入”将它们移动到正确的位置。
界面
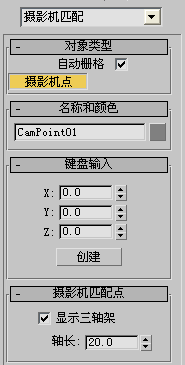
“名称和颜色”卷展栏
在创建“摄影机点”对象之前对其命名。如果要在创建对象之后对其命名,则在“修改”面板中更改其名称。
“键盘输入”卷展栏
- X、Y、Z
-
使用此选项可以在插入“摄影机点”对象的位置输入 X、Y、Z 坐标。字段值反映了当前“单位”设置。
- 创建
-
将“摄影机点”对象插入到场景中。
“摄影机匹配点”卷展栏
- 显示三轴架
-
控制三轴架是否与“摄影机”点对象一起显示。默认设置为启用。
- 轴长
-
控制三轴架的长度。当“显示三轴架”处于启用状态时,可以在调整微调器箭头时在视口中观察三轴架更改长度。当“显示三轴架”处于禁用状态时,仍然可以调整“轴长度”值,但不显示三轴架。