Diese Formeln werden verwendet, um entweder eine Welle (mit mind. einem Schnitt) oder einen Träger (mit einem konstantem Schnitt) mit mehreren Auflagern und Lasten zu berechnen.
Die Wellen-/Trägerachse ist an der Z-Achse ausgerichtet. Wenn die Auswirkungen auf die Materialdichte in die Berechnung mit einbezogen werden, wird der Schwerkraftvektor an der Y-Achse ausgerichtet.
Schubkräfte:
Biegemomente:
Durchbiegungswinkel:

Dabei gilt:
|
E |
Elastizitätsmodul bei Spannung |
|
|
J |
Trägheitsmoment |
|
|
G |
Schubelastizitätsmodul |
|
| β |
Koeffizient für Schubverschiebung |
Durchbiegung:
![]()
Biegespannung:
Scherspannung:

Torsionsspannung:
Spannung:
Reduzierte Spannung:
![]()
Dabei gilt:
| σ B | Biegespannung | |
| σ T |
Spannung |
|
| τ | Torsionsspannung | |
| τ S | Scherspannung | |
| α | α = 3 für HMH | |
| α = 4 für Tresca-Guest |
Beispielberechnung
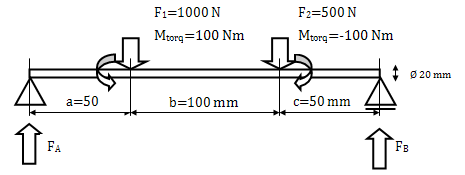
Elastizitätsmodul E = 210 000 MPa
Schubelastizitätsmodul G = 81 000 MPa
Koeffizient für Schubverschiebungβ=1.118
Modus der reduzierten Spannung: HMH
Die Materialdichte soll nicht berücksichtigt werden.
Gegenkräfte:


Maximale Scherspannung:
Maximale Torsionsspannung:
Maximales Moment:
![]()
Maximale Biegespannung:

Maximale reduzierte Spannung:

Verdrehungswinkel: