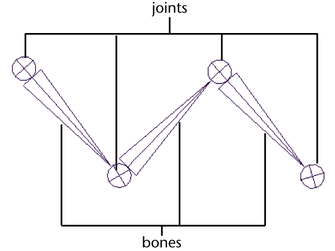
Joints are the building blocks of skeletons and their points of articulation. Also, joints have no shape and therefore can not be rendered. Each joint can have one or more bone attached to it, and more than one child joint. Joints let you transform a skeleton when posing and animating a bound model.
Bones do not have nodes, and they do not have a physical or calculable presence in your scene. Bones are only visual cues that illustrate the relationships between joints.
Anatomical joint types
Various joint attributes determine how joints behave. By adjusting the attributes of a joint, you can limit how far a joint can rotate or restrict what planes it can rotate about. For example, to create a joint chain that moves and rotates like the human neck, you would set the degrees of freedom for the joints so that they rotate about only 2 axes and then you would limit each joints range of rotation. See Understanding the attributes of a joint.
Ball joint
A ball joint is a joint that can rotate about all three of its local axes. For example, the human shoulder is a ball joint.
Universal joint
A universal joint is a joint that can rotate about only two of its local axes. The human wrist is a good example of a universal joint, though the wrist has limitations on the extent it can rotate.
Hinge joint
A hinge joint is a joint that can rotate about only one of its local axes. For example, the human knee is a hinge joint.