Les contraintes de transmission de mouvement définissent le mouvement désiré entre les composants d'un ensemble. Etant donné qu'elles ne fonctionnent qu'avec des degrés de liberté ouverts, elles n'entrent pas en conflit avec les contraintes positionnelles, redimensionnent les pièces adaptatives ou déplacent les composants bloqués.
Les contraintes de transmission de mouvement sont affichées dans le navigateur. Lorsque vous cliquez ou passez le curseur sur l'entrée du navigateur, les composants contraints sont mis en évidence dans la fenêtre graphique.
La commande Piloter une contrainte n'est pas disponible avec les contraintes de transmission de mouvement. Cependant, les pièces auxquelles sont appliquées des contraintes de transmission de mouvement peuvent être pilotées indirectement en fonction de la direction et du rapport spécifiés.
- Mode d'accès
- Sur le ruban, cliquez sur l'
onglet Assembler
 le groupe de fonctions Relations
Contrainte
le groupe de fonctions Relations
Contrainte
 , puis cliquez sur l'onglet Mouvement.
, puis cliquez sur l'onglet Mouvement.
Type et Technique
Spécifient le type de contrainte et illustrent la technique permettant le mouvement désiré entre les composants sélectionnés. Ce type de contrainte peut être appliqué entre des éléments coniques, cylindriques, plans et linéaires.
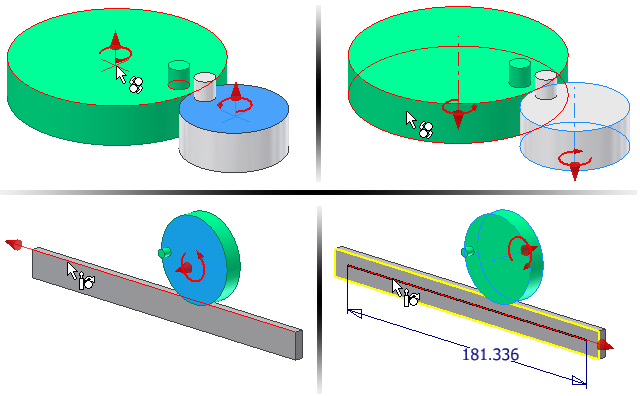
- Contrainte de rotation

- Indique que la première pièce sélectionnée pivote par rapport à une autre pièce en fonction d'un rapport donné. Cette contrainte est généralement utilisée pour les roulements, les engrenages et les poulies.
- Contrainte de rotation-translation

- Indique que la première pièce sélectionnée pivote par rapport à la translation d'une autre pièce selon une distance donnée. Cette contrainte est généralement utilisée pour afficher des mouvements plans, tels que ceux des mécanismes à crémaillère.
Sélection
Sélectionne un élément géométrique sur deux composants à contraindre l'un à l'autre.
- Première sélection

- Permet de sélectionner le premier composant. Sélectionnez une face plane pour définir le rapport ou la distance. Sélectionnez une face cylindrique pour calculer le rapport ou la distance. L'aperçu de la première sélection s'affiche en rouge dans la fenêtre graphique. Pour mettre fin à la première sélection, cliquez sur Seconde sélection.
- Seconde sélection

- Permet de sélectionner le second composant. Sélectionnez une face cylindrique sur un composant en rotation ou une arête linéaire sur un composant en translation pour calculer le rapport ou la distance. L'aperçu de la seconde sélection s'affiche en vert dans la fenêtre graphique. Pour sélectionner un élément géométrique différent sur le premier composant, cliquez sur Première sélection et effectuez une nouvelle sélection.
- Choisir la pièce d'abord

- Limite la géométrie sélectionnable à un seul composant. Cette option s'utilise lorsque des composants sont très proches ou partiellement cachés. Désactivez l'option pour rétablir le mode de sélection.
Rapport ou Distance
Indique le mouvement du premier composant sélectionné par rapport au deuxième élément sélectionné.
- Rapport
- Pour les contraintes de rotation, le rapport indique le degré de rotation de la seconde sélection lors de la rotation de la première sélection. Par exemple, une valeur de 4.0 (4:1) entraîne la rotation de la seconde sélection sur quatre unités pour chaque unité de rotation de la première sélection. Une valeur de 0.25 (1:4) entraîne la rotation de la seconde sélection sur une unité lorsque la première sélection effectue une rotation de quatre unités. La valeur par défaut est 1.0 (1:1). En cas de sélection de deux surfaces cylindriques, le logiciel calcule et affiche un rapport par défaut relatif aux rayons des deux sélections.
- Distance
- Pour les contraintes de rotation/translation, la distance indique la valeur du déplacement de la seconde sélection pour une rotation de la première sélection. Par exemple, une valeur de 4.0 mm entraîne le déplacement de la seconde sélection sur 4.0 mm pour chaque rotation complète de la première sélection. Si la première sélection correspond à une surface cylindrique, le logiciel calcule et affiche une distance par défaut égale à la circonférence de la première sélection.
Remarque : Le rapport et les paramètres de distance sont utilisés pour spécifier l'importance du mouvement de la deuxième sélection par rapport à la première sélection. Toutefois, la contrainte est bidirectionnelle. Si la seconde sélection est déplacée, la première sélection se déplace d'une distance ou d'un rapport inverse, en fonction du type de contrainte.
Autres 
- Nom
- Définit le nom de la contrainte. Crée un nom unique pour la contrainte dans le navigateur. Vous pouvez entrer un nom ou laisser le champ vide pour qu'un nom par défaut soit automatiquement créé.