ダイナミック シミュレーション環境またはアセンブリ環境では、機能メカニズムを構築することを目的としています。 ダイナミック シミュレーションでは、動的で現実的な荷重の影響を機能メカニズムに加えることで、真のリンク機構を作り出します。
ダイナミック シミュレーション環境とアセンブリ環境は、どちらもメカニズムの作成にかかわりますが、いくつか重要な違いがあります。 最も基本的かつ重要な違いは、自由度です。
既定では、Autodesk® Inventor® Simulation のコンポーネントの自由度はゼロです。アセンブリ環境の非拘束で非固定のコンポーネントの自由度は 6 です。
アセンブリ環境では、自由度を制限するために拘束を追加します。
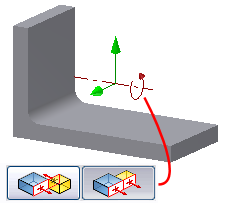
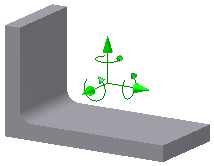
さらに、ダイナミック シミュレーション環境では、自由度を指定するためにジョイントを作成します。