システム テーブル TB_JOB_STATE_TRANSITION には、ジョブの状態トランジション ルールを格納します。追加のトランジション ルールを定義できます。さらに、すべてのジョブ環境設定とデータの取り込みの開始時にこれを実行する必要があります。
|
TB_JOB_STATE_TRANSITION の属性 |
説明 |
|
|
PREDECESSOR_ID |
状態図の前の状態(TB_JOB_STATE)への外部キーを格納します。 |
|
|
SUCCESSOR_ID |
状態図の次の状態(TB_JOB_STATE)への外部キーを格納します。 |
|
|
TRANSITION_TYPE |
状態トランジションの実行時に実行する必要があるソフトウェアを示す値を指定します。
|
|
|
TRANSITION_DIRECTION |
トランジションを前方(F)または後方(B)に実行するかどうかを示す値を指定します。 例: 前方トランジションは結合プロセスである場合があります(オープン -> 保留)。後方トランジションは結合プロセス処理を元に戻すプロセスである場合があります(保留 -> オープン)。 |
|
削除の D を持つトランジション タイプを後方にすることはできません。
次の表は、既定のジョブの状態トランジション ルールを示しています。
|
ID |
先行 |
後続 |
方向 |
種類 |
|
1 |
オープン(3) |
保留(2) |
前方(F) |
結合(M) |
|
2 |
保留(2) |
オープン(3) |
後方(B) |
結合(M) |
|
3 |
保留(2) |
ライブ(1) |
前方(F) |
結合(M) |
|
4 |
オープン(3) |
削除済み(4) |
前方(F) |
削除(D) |
|
5 |
保留(2) |
削除済み(4) |
前方(F) |
削除(D) |
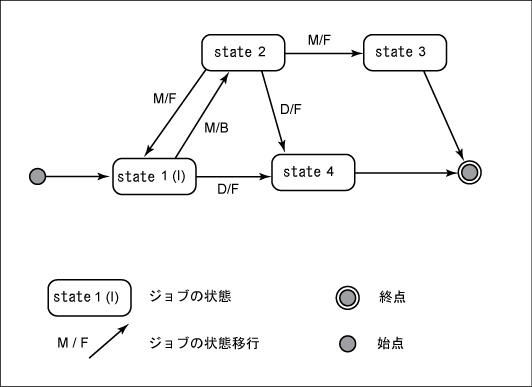
ジョブの状態とジョブの状態トランジション。トランジションの方向は、前方 F、または後方 B とすることができます。M はフィーチャを結合します。
初期ポイントは後続の初期状態のみを持つことができます。初期状態は 1 つのみ存在できます。