Funkcja rot zwraca punkt, który został obrócony wokół wybranej osi.
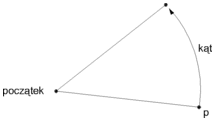
- rot(p,pocz,kąt)
-
Obraca punkt p o kąt ang dookoła osi Z przechodzącej przez punkt origin, jak pokazano w poniższym przykładzie:
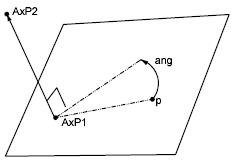
- rot(p,OśP1,OśP2,kąt)
-
Obraca punkt p o kąt ang dookoła osi przechodzącej przez punktyAxP1 oraz AxP2, jak okazano w następującym przykładzie. Oś ma kierunek od pierwszego punktu do drugiego punktu.