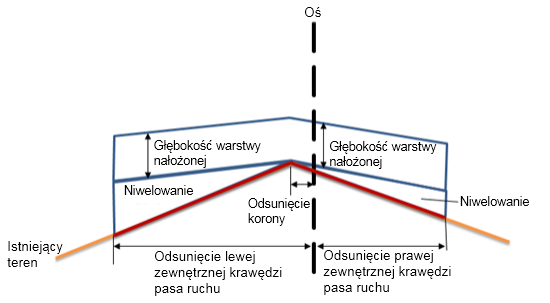
Ten podzespół tworzy nakładkę na istniejącej jezdni z koroną wraz z warstwą niwelowania dodaną powyżej istniejącego terenu w razie potrzeby.
Dołączenie
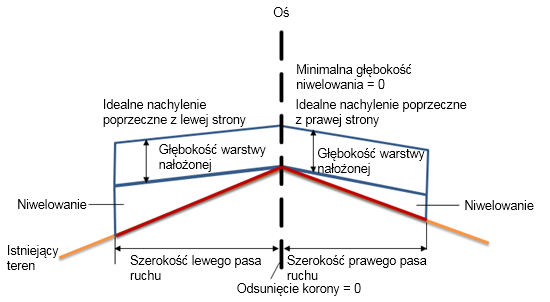
Punkt dołączenia jest punktem korony warstwy nałożonej z nachyleniem poprzecznym wykończonego terenu.
Parametry wejściowe
| Parametr | Opis | Rodzaj | Wartość domyślna (metry lub stopy) |
|---|---|---|---|
| Odsunięcie korony | Dodatnie lub ujemne odsunięcie w punkcie korony. | Liczbowy | 0,000 m (0,00 stopy) |
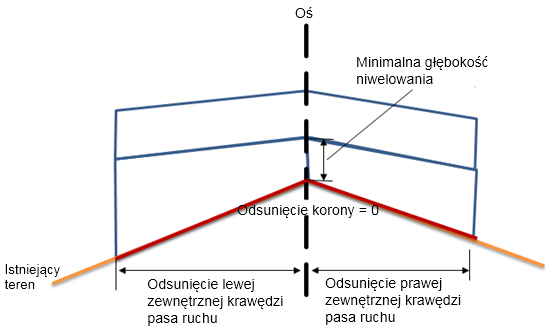
| Korona — Użyj opcji profilu | Wybierz, aby powiązać wewnętrzną krawędź warstwy nałożonej z profilem lub dostosować rzędną punktu korony do minimalnej głębokości niwelowania. | Zdefiniowany przez użytkownika | Minimalna głębokość niwelowania |
| Szerokość projektowanego pasa ruchu taka sama, jak szerokość istniejącego pasa ruchu |
|
Zdefiniowany przez użytkownika | Nie |
| Lewa wewnętrzna krawędź istniejącego pasa ruchu | Jest to punkt początkowy do obliczania nachylenia istniejącego terenu lewego pasa ruchu. | Liczbowy | 0,000 m (0,00 stopy) |
| Prawa wewnętrzna krawędź istniejącego pasa ruchu | Jest to punkt początkowy do obliczania nachylenia istniejącego terenu prawego pasa ruchu. | Liczbowy | 0,000 m (0,00 stopy) |
| Lewa zewnętrzna krawędź istniejącego pasa ruchu | Jest to punkt końcowy do obliczania nachylenia istniejącego terenu lewego pasa ruchu. | Liczbowy | -12,000 m (-12,000 stóp) |
| Prawa zewnętrzna krawędź istniejącego pasa ruchu | Jest to punkt końcowy do obliczania nachylenia istniejącego terenu prawego pasa ruchu. | Liczbowy | 12,000 m (12,000 stóp) |
| Głębokość warstwy nałożonej | Głębokość warstwy nałożonej. | Liczbowy, dodatni | 0,300 m (0,300 stopy) |
| Opcje nachylenia warstwy nałożonej z prawej i lewej strony | Określa opcje nachylenia warstwy nałożonej z prawej i lewej strony.
Wskazówka: Odchyłka to termin opisujący sposób obliczania poprawionego nachylenia poprzecznego w przypadku nakładki w podzespole modernizacji. Wyniki odchyłki są różne oraz względne w stosunku do tolerancji nachylenia i różnicy nachylenia między nachyleniem poprzecznym istniejącego terenu a idealnym nachyleniem poprzecznym. Jeśli różnica nachylenia jest mniejsza niż tolerancja nachylenia dla podzespołu, przypadek jest traktowany jako „w granicach tolerancji”. Jeśli różnica nachylenia jest większa niż tolerancja nachylenia dla podzespołu, przypadek jest traktowany jako „poza granicami tolerancji”.
Uwaga: Tolerancja nachylenia jest wartością bezwzględną. Dlatego obie różnice nachylenia 0,4% i -0,4% mają wartość bezwzględną 0,4%. Jeśli tolerancja nachylenia wynosi 0,5%, bezwzględna różnica nachylenia 0,4% zostanie uznana za znajdującą się w granicach tolerancji.
|
Zdefiniowany przez użytkownika | Zdefiniowane przez użytkownika bez odchyłek |
| Idealne nachylenie poprzeczne z lewej strony | Określa zdefiniowane przez użytkownika idealnie nachylenie poprzeczne dla niwelety lewego pasa ruchu. | Liczbowy | -2,00% |
| Minimalna głębokość niwelowania z lewej strony | Minimalna głębokość niwelowania pomiędzy istniejącą powierzchnią a spodem lewej warstwy nałożonej. | Liczbowy, dodatni | 0,300 m (0,300 stopy) |
| Tolerancja nachylenia z lewej strony | Tolerancja zmian nachylenia lewej warstwy nałożonej. | Liczbowy, dodatni | 0,50% |
| Idealne nachylenie poprzeczne z prawej strony | Określa zdefiniowane przez użytkownika idealnie nachylenie poprzeczne dla niwelety prawego pasa ruchu. | Liczbowy | -2,00% |
| Minimalna głębokość niwelowania z prawej strony | Minimalna głębokość niwelowania pomiędzy istniejącą powierzchnią a spodem prawej warstwy nałożonej. | Liczbowy | 0,300 m (0,300 stopy) |
| Tolerancja nachylenia z prawej strony | Tolerancja zmian nachylenia prawej warstwy nałożonej. | Liczbowy, dodatni | 0,50% |
| Szerokość lewego pasa ruchu | Szerokość lewego pasa ruchu określana przez odsunięcie zewnętrznej krawędzi lewego pasa ruchu od wewnętrznej krawędzi lewego pasa ruchu. | Liczbowy, ujemny | -12,000 m (-12,000 stóp) |
| Szerokość prawego pasa ruchu | Szerokość prawego pasa ruchu określana przez odsunięcie zewnętrznej krawędzi prawego pasa ruchu od wewnętrznej krawędzi prawego pasa ruchu. | Liczbowy, dodatni | 12,000 m (12,000 stóp) |
Parametry wejściowe — dodatkowe odniesienie
Odsunięcie korony
Parametry wyjściowe
| Parametr | Opis | Rodzaj |
|---|---|---|
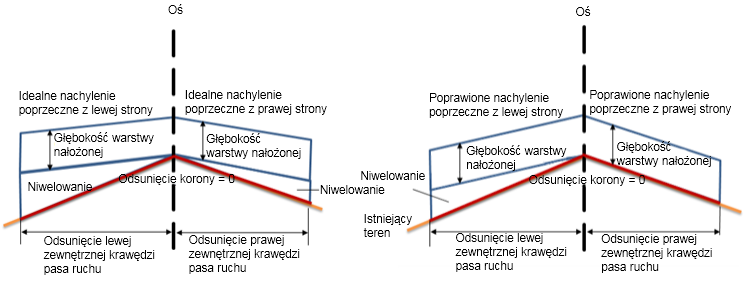
| Poprawione nachylenie poprzeczne z lewej strony | Poprawione nachylenie poprzeczne z lewej strony reprezentuje dopasowane nachylenie poprzeczne dla lewej strony profilu drogi, które zostało zoptymalizowane, aby pokrywać się, w maksymalnym możliwym zakresie, z podanymi przez użytkownika parametrami podzespołu odnowy. | Procent |
| Poprawione nachylenie poprzeczne z prawej strony | Jest to dopasowane nachylenie poprzeczne drogi z prawej strony, które zostało zoptymalizowane, aby pokrywać się, w maksymalnym możliwym zakresie, z podanymi przez użytkownika parametrami podzespołu odnowy. | Procent |
| Nachylenie istniejącego terenu z lewej strony | Nachylenie poprzeczne (%) profilu istniejącego terenu dla lewego pasa ruchu obliczone od wewnętrznej do zewnętrznej krawędzi lewego pasa ruchu. | Procent |
| Nachylenie istniejącego terenu z prawej strony | Nachylenie poprzeczne (%) profilu istniejącego terenu dla prawej strony drogi obliczone od wewnętrznej do zewnętrznej krawędzi prawego pasa ruchu. | Procent |
Parametry docelowe
| Parametr | Opis | Wymagany? |
|---|---|---|
| Powierzchnia docelowa | Obiekt definiujący powierzchnię istniejącej jezdni. | Tak |
| Docelowe odsunięcie korony | Obiekt definiujący odsunięcie punktu korony. Następujące typy obiektów można zastosować jako obiekty docelowe do określania tego odsunięcia: linie trasowania, polilinie, linie charakterystyczne lub figury pomiarowe. | Nie |
| Docelowa szerokość lewego pasa ruchu | Obiekt definiujący odsunięcie zewnętrznej krawędzi lewego pasa ruchu od wewnętrznej krawędzi lewego pasa ruchu. Następujące typy obiektów można zastosować jako obiekty docelowe do określania tego odsunięcia: linie trasowania, polilinie, linie charakterystyczne lub figury pomiarowe. | Nie |
| Docelowa szerokość prawego pasa ruchu | Obiekt definiujący odsunięcie zewnętrznej krawędzi prawego pasa ruchu od wewnętrznej krawędzi prawego pasa ruchu. Następujące typy obiektów można zastosować jako obiekty docelowe do określania tego odsunięcia: linie trasowania, polilinie, linie charakterystyczne lub figury pomiarowe. | Nie |
| Docelowe odsunięcie lewej wewnętrznej krawędzi istniejącego pasa ruchu | Obiekt definiujący odsunięcie lewego wewnętrznego punktu próbkowania, który zostanie użyty do obliczenia nachylenia istniejącej powierzchni. Następujące typy obiektów można zastosować jako obiekty docelowe do określania tego odsunięcia: linie trasowania, polilinie, linie charakterystyczne lub figury pomiarowe. | Nie |
| Docelowe odsunięcie lewej zewnętrznej krawędzi istniejącego pasa ruchu | Obiekt definiujący odsunięcie lewego zewnętrznego punktu próbkowania, który zostanie użyty do obliczenia nachylenia istniejącej powierzchni. Następujące typy obiektów można zastosować jako obiekty docelowe do określania tego odsunięcia: linie trasowania, polilinie, linie charakterystyczne lub figury pomiarowe. | Nie |
| Docelowe odsunięcie prawej wewnętrznej krawędzi istniejącego pasa ruchu | Obiekt definiujący odsunięcie prawego wewnętrznego punktu próbkowania, który zostanie użyty do obliczenia nachylenia istniejącej powierzchni. Następujące typy obiektów można zastosować jako obiekty docelowe do określania tego odsunięcia: linie trasowania, polilinie, linie charakterystyczne lub figury pomiarowe. | Nie |
| Docelowe odsunięcie prawej zewnętrznej krawędzi istniejącego pasa ruchu | Obiekt definiujący odsunięcie prawego zewnętrznego punktu próbkowania, który zostanie użyty do obliczenia nachylenia istniejącej powierzchni. Następujące typy obiektów można zastosować jako obiekty docelowe do określania tego odsunięcia: linie trasowania, polilinie, linie charakterystyczne lub figury pomiarowe. | Nie |
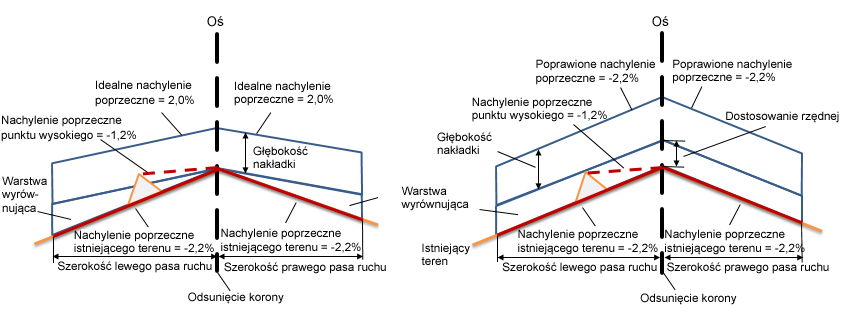
Zachowanie
W tym podzespole założono, że nie zostanie dodana do niego warstwa niwelowania.
| Dane wejściowe | Wartość |
|---|---|
| Idealne nachylenie poprzeczne, lewa strona | -2,0% |
| Idealne nachylenie poprzeczne, prawa strona | -2,0% |
| Odsunięcie korony | 0,000' (0,00 m) |
| Szerokość lewego pasa ruchu | 12' (3,6 m) |
| Szerokość prawego pasa ruchu | 12' (3,6 m) |
| Minimalna głębokość niwelowania | 0,000' (0,00 m) |
| Tolerancja nachylenia | 0,50% |
| Opcje nachylenia warstwy nałożonej | Zdefiniowane przez użytkownika z odchyłkami |
| Użyj opcji profilu | Minimalna głębokość niwelowania |
| Dane wejściowe lewej strony | Wartość |
|---|---|
| Nachylenie poprzeczne istniejącego terenu | -2,2% |
| Nachylenie poprzeczne istniejącego terenu – Idealne nachylenie poprzeczne | 0,2% |
| Nachylenie poprzeczne punktu wysokiego mierzone od punktu korony do punktu wysokiego | -1,2% |
| Nachylenie poprzeczne punktu wysokiego – Idealne nachylenie poprzeczne | 0,8% |
| Tolerancja nachylenia | Różnica nachylenia między istniejącym nachyleniem poprzecznym terenu a idealnym nachyleniem poprzecznym wynosi 0,2%, czyli jest mniejsza niż Tolerancja nachylenia wynosząca 0,50%. |
| Poprawione nachylenie poprzeczne |
Poprawione nachylenie poprzeczne zostanie skorygowane na -2,2%. |
| Dane wejściowe prawej strony | Wartość |
|---|---|
| Nachylenie poprzeczne istniejącego terenu | -2,2% |
| Nachylenie poprzeczne istniejącego terenu – Idealne nachylenie poprzeczne | -0,2% |
| Tolerancja | Nachylenie istniejącego terenu minus Idealne nachylenie poprzeczne wynosi -0,2%, co jest mniejsze niż Tolerancja nachylenia 0,5%. |
| Poprawione nachylenie poprzeczne | Poprawione nachylenie poprzeczne zostanie skorygowane na -2,2% |
| Końcowe dane wejściowe | Wartość |
|---|---|
| Poprawione nachylenie poprzeczne, lewa strona | -2,2% |
| Poprawione nachylenie poprzeczne, prawa strona | -2,2% |
| Dopasuj rzędną | Rzędna zostanie skorygowana z powodu rzędnej najwyższego punktu po lewej stronie. |
Wyjście
| Wyjście | Wartość |
|---|---|
| Poprawione nachylenie poprzeczne, lewa strona | -2,2% |
| Poprawione nachylenie poprzeczne, prawa strona | -2,2% |
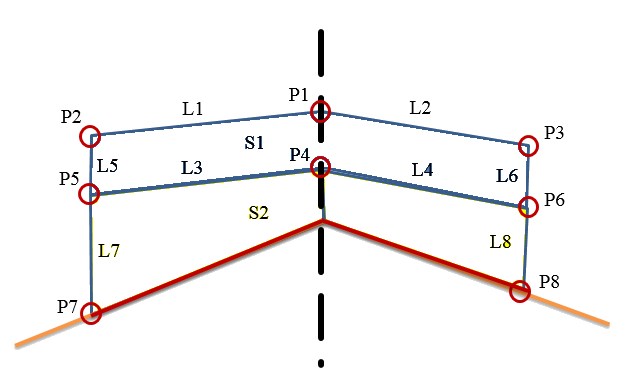
| Punkt, połączenie lub kształt | Kod | Opis |
|---|---|---|
| P1 | Crown | Punkt korony dla góry warstwy nałożonej. |
| P2, P3 | EOV | Krawędzie warstwy nałożonej na nachyleniu końcowym dla lewej i prawej strony drogi. |
| P4 | Crown_Overlay | Punkt korony dla spodu warstwy nałożonej. |
| P5, P6 | EOV_Overlay | Krawędzie spodu warstwy nałożonej dla lewej i prawej strony drogi. |
| P7, P8 | EOV_Leveling | Krawędzie spodu niwelowania dla lewej i prawej strony drogi. |
| L1, L2 | Top, Pave | Góra warstwy nałożonej dla lewej i prawej strony drogi. |
| L3, L4, L5, L6 | Overlay | Połączenia warstwy nałożonej (wysokość i szerokość) dla lewej i prawej strony drogi. |
| L7, L8 | Level | Połączenia niwelowania (wysokość) dla lewej i prawej strony drogi. |
| S1 | Overlay | Obszar pomiędzy górą i spodem warstwy nałożonej. |
| S2 | Level | Obszar pomiędzy górą i spodem niwelowania. |
Schemat kodowania