Pierwsze koło pasowe jest kołem prowadzącym. Reszta kół pasowych to koła napędzane lub koła pośrednie. Moc wprowadzana może być rozdzielona pomiędzy kilka kół prowadzonych, za pomocą współczynnika mocy dla każdego koła. Siły i momenty obrotowe obliczane są w odpowiedni sposób.
Łuk współczynnika korekcji kontaktu c 1
Łuk współczynnika korekcji kontaktu poprawia stosunek mocy pasów klinowych dla kół napędowych, gdy łuk kontaktu jest różny od 180 stopni. Rozmiar współczynnika korekcji jest określany z następującego równania.
Współczynnik eksploatacyjny c 2
Współczynnik eksploatacyjny korzysta z dziennego okresu pracy, typu jednostek napędowych i maszyn napędzanych. Współczynnik eksploatacyjny poprawia przenoszoną moc. Należy również rozważyć zwiększenie współczynnika eksploatacyjnego dla napędów z wysokim startowym momentem obrotowym, wysoką startową częstotliwością, wysokim obciążeniem dynamicznym lub przyspieszeniem.
Współczynnik korekcji długości pasa c 3
Współczynnik korekcji długości pasa korzysta z modyfikacji stosunku mocy pasa, dla pasów, których długość różni się od bazowej długości pasa. Wartość jest definiowana przez producenta pasa i jest określana w pliku danych pasa. Dla bazowej długości pasa wartość korekcji długości jest równa 1,0, co nie wpływa na wyniki.
Współczynnik korekcji liczby pasów c 4
Współczynnik korekcji liczby pasów korzysta z różnicy w rozdzieleniu obciążeń pomiędzy wieloma pasami dla przekładni, gdy użyty jest więcej niż jeden pas klinowy. Różnica w obciążeniu każdego pasa jest spowodowana przez różnicę długości pasów, jak również przez deformacje wału. Współczynnik poprawia stosunek mocy pasa klinowego poprzez wbudowaną tabelę przybliżonych wartości, tak jak poniżej. Wartości, których brakuje w tabeli, są obliczane przy użyciu interpolacji liniowej.
|
z |
1 |
3 |
6 |
999 |
|
c 4 |
1 |
0,95 |
0,9 |
0,85 |
Współczynnik korekcji liczby kół pasowych c 5
Ten współczynnik poprawia moc znamionową pasa. Korzysta z wymuszenia dodatkowych obciążeń zginania spowodowanych przez dodatkowe koła pasowe lub pośrednie. Użycie koła pośredniego (lub kilku) ma wpływ na wydajność pasa, więc stosunek mocy pasa powinien być zmniejszony.
Zazwyczaj koła pośrednie są używane do zapewnienia podwyższenia napędów ze stałą odległością osi, do skrętu narożników, przerwania długich objęć, gdzie drgania mogą stanowić problem, do utrzymania rozciągania, do zachowania jako urządzenie sprzęgłowe itp. Zaleca się, aby unikać stosowania kół pośrednich, jeśli jest to możliwe. Jeśli koła pośrednie są potrzebne w napędzie, wymiary kół i ich położenia powinny być tak zaprojektowane, aby minimalnie redukować trwałość pasa. Wewnętrzne koła pośrednie powinny być przynajmniej tak duże jak najmniejsze koło pasowe przenoszące moc.
Zewnętrzne koła pośrednie powinny być przynajmniej 50% większe niż najmniejsze koło pasowe przenoszące moc.
Współczynnik korekcji liczby kół pasowych jest domyślnie określany przez wbudowaną tabelę wartości przybliżonych. Wartości, których brakuje w tabeli, są obliczane przy użyciu interpolacji liniowej.
|
k |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
100 |
|
c 5 |
1 |
0,91 |
0,86 |
0,81 |
0,78 |
0,76 |
0,75 |
0,7 |
Współczynnik rozciągliwości k 1
Współczynnik rozciągliwości pozwala kontrolować początkowe rozciągnięcie pasa przy zakładaniu. Producenci pasów zalecają stosowanie się do pewnych zaleceń. Jeśli pas nie jest rozciągnięty zgodnie z tymi zaleceniami, moc znamionowa danego pasa może zostać niewłaściwie określona. Rozciągnięcie pasa przy zakładaniu ma pewien wpływ na sprawność, poślizg pasa i trwałość użytkową. Istnieje powszechnie używany współczynnik rozciągliwości pasa od 1,0 do 1,5, jednak jego zastosowanie podlega indywidualnej decyzji.
Niewystarczające rozciągnięcie pasa powoduje niewystarczające przeniesienie mocy, obniżoną sprawność i przedwczesne uszkodzenie pasa z powodu poślizgu pasa.
Nadmierne rozciągnięcie pasa prowadzi do wysokiego nacisku na określoną powierzchnię, do ryzyka krzyżowej elastyczności, zwiększonego naprężenia elastyczności i zwiększonego odkształcenia na składniki naprężenia, co prowadzi do przedwczesnych pęknięć i wydłużeń.
Prawidłowe rozciągnięcie pasa jest rozciągnięciem wystarczającym, aby powstrzymać pas przed poślizgiem w warunkach normalnego obciążenia.
Współczynnik sprawności momentu obrotowego η t
Współczynnik sprawności momentu obrotowego opisuje jakość przekładni pasowej. Pod uwagę brane są straty energii, prowadzące do zmniejszenia momentu obrotowego na wale. Występują czynniki takie jak: deformacja energii pasa, turbulencje powietrza w rowkach itp. Utrata mocy spowodowana poślizgiem pasa nie jest tu uwzględniana i jest osobno określana przez kreator. W wyniku połączenia tych dwóch czynników otrzymywana jest sprawność końcowa napędu pasowego.
Poślizg pasa i całkowita sprawność napędu pasowego η

Współczynnik napędu pasa jest określany dla koła pasowego o największym prawdopodobieństwie wystąpienia poślizgu jako
![]()
Poślizg pasa jest określany za pomocą wbudowanej tabeli poślizgu.
Prędkość napędzanego koła pasowego
![]()
Moc wyjściowa napędzanego koła pasowego
P i = P xi F p v η t (1 - s)
![]()
Wbudowana tabela poślizgu
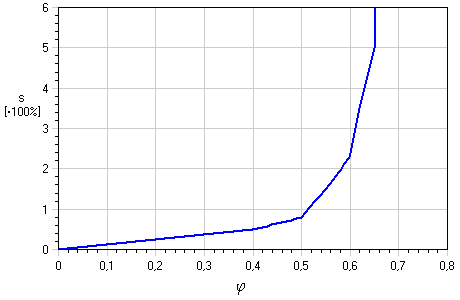
Założono, że:
- Poślizg pasa występuje na napędowym kole pasowym, zatem prędkość wszystkich napędzanych kół pasowych i kół pośrednich jest zależna od tego samego poślizgu.
- Pomijana jest zmiana prędkości pasa w wyniku poślizgu. Zwykle zakres poślizgu pasa jest równy 1% ~ 2%, czego wynikiem jest s = 0,01 ~ 0,02
Przełożenie przekładni
Przełożenie przekładni dla kreatora pasów klinowych jest określane w przypadku każdego koła pasowego oraz koła pośredniego. Istnieją trzy rodzaje przełożeń, mających określone znaczenie.
|
i D |
[-] |
Żądane przełożenie przekładni (współczynnik prędkości) danego koła pasowego. Przełożenie to służy jako typ projektu rozmiaru koła pasowego. Użytkownik ustawia to przełożenie, aby umożliwić kreatorowi pasów klinowych wyszukanie najbliższej średnicy koła pasowego pozwalającej na uzyskanie żądanego przełożenia przekładni. |
|
i T |
[-] |
Idealne przełożenie przekładni (współczynnik prędkości) danego koła pasowego. Przełożenie to jest obliczane bezpośrednio ze średnic kół pasowych, jako wartość dokładna. Poślizg pasa nie jest uwzględniany. |
|
i |
[-] |
Przełożenie (współczynnik prędkości) danego koła pasowego. Przełożenie jest obliczane z uwzględnieniem poślizgu pasa. Wartości tej należy użyć jako najbliższego przełożenia przekładni w przypadku pełnego obciążenia koła pasowego. Moc i prędkość wału danego koła pasowego określane są za pomocą tego przełożenia. |
Zmiana tarcia za pomocą prędkości pasa f mod
Zmiana tarcia za pomocą prędkości pasa opisuje wielkość zmiany współczynnika tarcia przy zmianach prędkości pasa. Jeśli współczynnik modyfikacji tarcia jest równy zero, nie ma wpływu na współczynnik tarcia.
Wynikowy współczynnik eksploatacyjny c PR
Wynikowy współczynnik eksploatacyjny jest określany z poniższego równania. Stosunek mocy znamionowej pasa dla danego układu przekładni jest porównywany z mocą do przeniesienia. Wynikowy współczynnik eksploatacyjny daje szybką odpowiedź, w jakim stopniu nadmiernie zaprojektowano napęd pasowy.
![]()
|
c PR < c 2 |
Kontrola wytrzymałości zakończona niepowodzeniem |
|
c PR ≥ c 2 |
Kontrola wytrzymałości zakończona powodzeniem |
|
c PR > c 2 |
Należy rozważyć zmianę układu przekładni, użycie innego pasa lub zmniejszenie szerokości pasa. |
Znaczenie użytych zmiennych:
|
β |
Łuk opasania [stopnie] |
|
F p |
Efektywny naciąg (lub efektywne naprężenie) [N] |
|
n 1 |
Prędkość napędowego koła pasowego [rpm] |
|
n i |
Prędkość danego napędzanego koła pasowego [rpm] |
|
i |
Przełożenie (współczynnik prędkości) danego koła pasowego [-] |
|
s |
Poślizg pasa [-] |
|
P x |
Współczynnik mocy danego koła pasowego [-] |
|
P R |
Moc znamionowa pasa, to moc, która jest przekazywana przez jeden pas [W] |
|
v |
Prędkość pasa [m/s] |
|
η t |
Współczynnik sprawności momentu obrotowego [-] |
|
P |
moc do przekazania [W] |
|
z |
Liczba pasów [-] |
Właściwości projektu geometrii