Wybór ustawień tych opcji wpływa na symulację dynamiczną do momentu, gdy ustawienia zostaną zmienione. Opcje należy ustawić zaraz po otworzeniu okna Symulacji dynamicznej.
- Na wstążce kliknij kartę Środowiska
 panel Początek
Symulacja dynamiczna, aby wyświetlić panele symulacji dynamicznej.
panel Początek
Symulacja dynamiczna, aby wyświetlić panele symulacji dynamicznej.
- Następnie kliknij kartę Symulacja dynamiczna
panel Zarządzanie
Ustawienia symulacji
 .
.
- Kliknij opcję Automatycznie przekształcaj wiązania w standardowe połączenia, aby włączyć automatyczny konwerter symulacji dynamicznej (Constraint Reduction Engine czyli CRE).
Domyślnie translator jest włączony.
Po kliknięciu przycisku OK moduł CRE automatycznie przekształca wiązania zespołu w standardowe połączenia i aktualizuje przekształcone połączenia przy następnym otwarciu mechanizmu.
- Jeśli oprogramowanie ma informować o nadmiernej ilości wiązań w mechanizmie, kliknij opcję Informuj o nadmiernej ilości wiązań.
Ustawienie to jest domyślne dla nowych mechanizmów, ale nie jest włączone domyślnie dla mechanizmów utworzonych w wersjach wcześniejszych oprogramowania niż wersja 2008. Po włączeniu tej opcji, w przypadku związania mechanizmu z nadmiarem, po kliknięciu przycisku OK i przed automatycznym utworzeniem połączeń standardowych w programie zostanie wyświetlony komunikat.
- Aby wyświetlić wizualne reprezentacje komponentów włączonych do różnych grup ruchomych, zaznacz pole wyboru Koloruj ruchome grupy. Wstępnie zdefiniowane nadpisania kolorów są przypisane do komponentów w tej samej grupie ruchomej. Ta opcja wspomaga analizę zależności pomiędzy komponentami. Aby przywrócić normalnie przypisane kolory komponentów, odznacz pole wyboru w oknie dialogowym ustawień lub kliknij prawym przyciskiem węzeł Grupy ruchome i wybierz opcję Koloruj ruchome grupy.
- Kliknij opcję Wszystkie położenia początkowe w 0,0,
 aby ustawić wszystkie położenia początkowe stopni swobody w punkcie 0, bez zmiany faktycznego położenia mechanizmu.
aby ustawić wszystkie położenia początkowe stopni swobody w punkcie 0, bez zmiany faktycznego położenia mechanizmu.
Ta opcja jest przydatna do wyświetlania wykresów krzywych rozpoczynających się w punkcie 0 w grapherze wyjściowym.
- Kliknij przycisk Przywróć wszystko
 , aby przywrócić wszystkie
układy współrzędnych do położeń początkowych ustanowionych podczas tworzenia układu współrzędnych połączenia.
, aby przywrócić wszystkie
układy współrzędnych do położeń początkowych ustanowionych podczas tworzenia układu współrzędnych połączenia.
Jest to ustawienie domyślne.
- Kliknij funkcję
Analiza naprężeń AIP , aby przygotować informacje o MES dla Analizy naprężeń AIP.
Ta funkcja umożliwia zapisanie danych istotnych dla MES w plikach wybranych części.
- Można także kliknąć opcję
Symulacja ANSYS , aby przygotować plik zawierający wszystkie informacje o MES do eksportu do programu ANSYS.
Ta funkcja umożliwia zapisanie danych istotnych dla MES w specjalnym pliku, który może być odczytany przez program ANSYS.
- W polu tekstowym podaj nazwę pliku, w którym mają być przechowywane informacje MES przeznaczone do eksportu do programu ANSYS.
- Można również kliknąć przycisk Zapisz w, aby określić istniejący plik lub, aby utworzyć plik.
Jeśli wybrany zostanie istniejący plik, oprogramowanie nadpisze wszystkie dane znajdujące się obecnie w pliku.
Uwaga: Jeśli używana jest aplikacja Ansys Workbench 10 lub 11, należy wykonać dodatkową zmianę pliku. Otwórz plik tekstowy i znajdź sekcję zatytułowaną „Stan bezwładności”. Z tej sekcji należy usunąć dwie linie. Te linie są „Nieruchome”, a skojarzony kod na następnej linii to „0” lub „1”.
- Kliknij przycisk Więcej
 , aby wyświetlić więcej właściwości.
, aby wyświetlić więcej właściwości.
- Aby wyświetlić informacje na temat ochrony praw autorskich do tworzonych plików AVI, kliknij opcję Wyświetl prawa autorskie w plikach AVI, a następnie w polu tekstowym wprowadź informacje na temat praw autorskich.
- Kliknij opcję Podaj prędkość kątową w obrotach na minutę (obr./min.), aby wprowadzić wartość prędkości kątowej w obr./min..
Prędkość wyjściowa jest jednak podawana w jednostkach zdefiniowanych podczas wyboru pustego pliku zespołu.
- Aby ustawić długość osi Z układu współrzędnych zespołu dla ramek 3D w oknie graficznym, w polu edycji wielkości osi Z wprowadź wartość procentową.
Rozmiar osi Z jest domyślnie równy 20% przekątnej ramki ograniczającej.
- Kliknij przycisk OK lub Zastosuj.
Naciśnięcie dowolnego z przycisków powoduje zapisanie ustawień. Naciśnięcie przycisku OK powoduje także zamknięcie okna dialogowego.
Model mechanizmu mikro
Ta opcja jest przeznaczona do pracy z mechanizmami o małej masie.
W trybie standardowym obliczenia zakończą się niepowodzeniem, jeśli masa lub bezwładność są mniejsze niż 1e-10 kg lub 1e-16 kg.m2. Równania dynamiczne są wówczas rozwiązywane za pomocą procedury Gaussa z dokładnością do 1e-10 (poniżej tej wartości obrót wynosi 0).
Jeśli włączony jest Tryb mechanizmu mikro, masa lub bezwładność muszą być większe niż 1e-20 kg lub 1e-32 kg.m2. Dla dokładności procedury Gaussa ustawiona jest wartość 1e-32.
Aby określić, kiedy ta opcja ma być włączona, sprawdź właściwości masowe w układzie współrzędnych połączenia.
- Jeśli istnieje stopień swobody przesunięcia, należy sprawdzić masę.
- Jeśli istnieje stopień swobody obrotu wzdłuż osi X, należy sprawdzić bezwładność główną Ixx wzdłuż osi X. Nie należy sprawdzać bezwładności krzyżowych Ixz ani Ixy, ponieważ nie mają one znaczenia.
|
Przykład 1 |
|
| W przypadku mechanizmu, którego najmniejsza część ma masę m = 6,5e-9 kg i główne bezwładności są następujące: Ixx = 1e-20 kg/m2, Iyy = 1e-20 kg.m2, nawet jeśli Izz > granica bezwładności = 1e-10 kg.m2: | |
|
|
Dokładność zespołu
Ta opcja ma zastosowanie tylko do zamkniętej pętli i złączy kontaktowych 2D.
Złącze kontaktowe 2D: umożliwia zdefiniowane maksymalnej autoryzowanej odległości pomiędzy punktami kontaktu. Wartość domyślna wynosi 1e-6 m = 1 μm.
- Ta odległość jest zawsze sprawdzana po zakończeniu iteracji Rungego-Kutty.
- Jeśli odległość pomiędzy tymi dwoma punktami nie przekracza dokładności zespołu, położenia i prędkości są akceptowane, a obliczenia są kontynuowane z szacunkowym błędem integracji.
- Jeśli odległość przekracza dokładność zespołu, położenia są korygowane do momentu, aż odległość nie przekracza dokładności zespołu. Następnie na podstawie nowych położeń korygowane są prędkości i obliczenia są kontynuowane z szacunkowym błędem integracji.
Pętla zamknięta: tak samo jak w przypadku połączenia kontaktowego 2D, ale możliwe są także wiązania kątowe (wyrażone w radianach) oparte na typie połączenia.
- Odległość i wiązania kątowe są sprawdzane po zakończeniu iteracji Rungego-Kutty.
- Jeśli wiązania odległości nie przekraczają dokładności zespołu, a wiązania kątowe nie przekraczają dokładności zespołu pomnożonej przez 1e3 (gdy dokładność zespołu jest wyrażona w metrach), położenia i prędkości są akceptowane, a obliczenia są kontynuowane z szacunkowym błędem integracji.
- W przeciwnym razie położenie są poprawiane, aż wiązania odległości nie przekraczają dokładności zespołu, a wiązania kątowe nie przekraczają dokładności zespołu pomnożonej przez 1e3. Następnie korygowane są prędkości i obliczenia są kontynuowane z szacunkowym błędem integracji.
Zmiana dokładności zespołu
Parametr Dokładność zespołu można zmienić w następujących sytuacjach:
- Na początku symulacji lub w jej trakcie mechanizm nie może być zespolony. Najpierw sprawdź wykonalność mechanizmu (czy żądane położenie jest realistyczne i czy mechanizm może je osiągnąć. Sprawdź wymuszone ruchy, które mogą prowadzić do przeciwnych położeń). Jeśli nie wykryto żadnego problemu i jeśli skala mechanizmu jest duża (rzędu 1 m), zwiększ dokładność zespołu (do 1e-5 m lub 1e-4 m). Jeśli skala jest mała (mniejsza niż 10 mm), zmniejsz dokładność zespołu (do 1e-7 m lub 1e-8 m).
- W przypadkach gdy mechanizm jest mniejszy niż 1 mm, zmniejsz dokładność zespołu (do 1e-8 m lub 1e-10 m) lub użyj Modelu mechanizmu mikro.
Dokładność rozwiązywania
Równania dynamiczne są integrowane za pomocą schematu integracji Rungego-Kutty piątego stopnia. W celu zapewnienia akceptowalnych wyników błędy integracji i przedziały czasowe są zarządzane w następujący sposób:
- Na podstawie obliczonych prędkości na końcu każdej iteracji Rungego-Kutty szacowany jest błąd integracji.
- Ten błąd integracji jest porównywany z określonym przez użytkownika parametrem o nazwie „dokładność rozwiązywania”.
- Jeśli błąd integracji nie przekracza dokładności rozwiązywania, iteracja jest akceptowana i integracja jest kontynuowana.
- Jeśli błąd integracji przekracza dokładność rozwiązywania, iteracja jest odrzucana. Następnie obliczany jest nowy przedział czasowy (krótszy niż rzeczywisty) i symulacja jest uruchamiana ponownie od początku iteracji z nową wartością przedziału czasowego.
Błąd integracji jest szacowany za pomocą określonych właściwości we wzorach Rungego-Kutty. Pozwala on łatwo obliczyć położenia „p” i prędkości „v” do piątego stopnia (wektory oznaczone odpowiednio jako „p5” i „v5”) oraz czwartego stopnia (wektory oznaczone jako „p4” i „v4”). Następnie błąd integracji jest definiowany dla położeń i prędkości w następujący sposób:
|
Integ_error_position = norm(p5 - p4) Integ_error_velocity = norm(v5 - v4) Gdzie norm oznacza określoną normę. |
Jeśli iteracja jest zaakceptowana, istnieje następująca zależność (w jednostkach metrycznych):
|
Integ_error_position = norm(p5 - p4) < Atol + | p5 | . Rtol Integ_error_velocity = norm(v5 - v4) < Atol + | v5 | . Rtol |
Gdzie:
| Atol | Rtol | |
|---|---|---|
|
Stopień swobody przesunięcia |
Dokładność rozwiązywania Wartość domyślna = 1e-6 Brak wartości maksymalnej |
Dokładność rozwiązywania Wartość domyślna = 1e-6 Brak wartości maksymalnej |
|
Stopień swobody obrotu |
Dokładność rozwiązywania . 1e3 Wartość domyślna = 1e-3 Wartość maksymalna = 1e-2 |
Dokładność rozwiązywania . 1e3 Wartość domyślna = 1e-3 Wartość maksymalna = 1e-2 |
Aby zilustrować ten proces, rozważmy następujące przykłady:
|
Przykład 1: Ilustracja błędu względnego Rtol |
|
|
Typ połączenia - Połączenie przesuwne 1 z określonym położeniem i prędkością |
|
|
p[1] = 4529,289768 m v[1] = 18,45687455 m/s |
|
|
Jeśli dokładność rozwiązywania jest ustawiona na 1e-6 (wartość domyślna), wyniki są podawane w postaci maksymalnie sześciu cyfr: |
|
|
p[1] = 4529,28 m v[1] = 18,4568 m/s |
|
|
Jeśli dokładność rozwiązywania jest ustawiona na 1e-8, wyniki są podawane w postaci maksymalnie ośmiu cyfr: |
|
|
p[1] = 4529,2897 m v[1] = 18,456874 m/s |
|
|
Przykład 2: Ilustracja błędu względnego dla Atol |
|
|
Typ połączenia: Połączenie przesuwne 1 z określonym położeniem i prędkością |
|
|
p[1] = 0,000024557 m v[1] = 0,005896476 m/s |
|
|
Jeśli dokładność rozwiązywania jest ustawiona na 1e-6 (wartość domyślna), wyniki są wyświetlane z dokładnością do sześciu miejsc dziesiętnych: |
|
|
p[1] = 0,000024 m v[1] = 0,005896 m/s |
|
|
Jeśli dokładność rozwiązywania jest ustawiona na 1e-8 (wartość domyślna), wyniki są wyświetlane z dokładnością do ośmiu miejsc dziesiętnych: |
|
|
p[1] = 0,00002455 m v[1] = 0,00589647 m/s |
|
| Powyższe informacje dotyczą również połączeń sworzniowych z równą dokładnością rozwiązywania dla Atol i Rtol pomnożoną przez 1e3: | |
|
Przykład 3: Ilustracja błędu względnego dla Rtol |
|
|
Typ połączenia: Połączenie sworzniowe 2 z określonym położeniem i prędkością |
|
|
p[2] = 12,53214221 rad p[2] = 21,36589547 rad |
|
|
Jeśli dokładność rozwiązywania jest ustawiona na 1e-6 (wartość domyślna), wyniki są podawane w postaci maksymalnie trzech cyfr: |
|
|
p[2] = 12,5 rad p[2] = 21,3 rad/s |
|
|
Jeśli dokładność rozwiązywania jest ustawiona na 1e-8, wyniki są podawane w postaci maksymalnie pięciu cyfr: |
|
|
p[2] = 12,532 rad p[2] = 21,365 rad/s |
|
Parametr Dokładność rozwiązywania można zmienić w następujących przypadkach:
- Symulacja została zatrzymana i został wyświetlony komunikat obłędzie, że przedział czasowy jest wystarczająco mały, aby zagwarantować wynik o dobrej jakości. Jeśli pojawiają się drobne przemieszczenia, zmniejsz dokładność rozwiązywania. Jeśli pojawiają się znaczne przemieszczenia, zwiększ dokładność rozwiązywania.
- Gdy aktywowane są złącza kontaktowe 2D (stan = 1). Jeśli pojawiają się małe siły, zmniejsz dokładność rozwiązywania. Jeśli pojawiają się duże siły, zwiększ dokładność rozwiązywania. Powyższe nie ma zastosowania do sił uderzeniowych.
- Podczas pracy z małymi mechanizmami (mniejszymi niż 1 mm). W takich przypadkach zmniejsz dokładność rozwiązywania lub zaznacz opcję Model mechanizmu mikro.
Prędkość przechwytywania
Ten parametr jest używany przy symulacjach zderzeń obiektów. Pomaga on w ograniczeniu podczas rozwiązywania liczby niewielkich odbić przed powstaniem trwałego kontaktu. W modelu zderzenia używany jest współczynnik przywrócenia „e”. Wartość jest określana przez użytkownika i pochodzi z przedziału od 0 do 1. W warunkach wynikowych, wartości traktowane są w następujący sposób:
- Gdy e = 0, rozpraszanie energii jest największe. Rozważmy przypadek zwykłej kuli spadającej na płaszczyznę z wysokości początkowej bez nadania prędkości początkowej i w warunkach grawitacji. Nie obserwujemy odbicia, zatem stan kontaktu = 1.
- Gdy e = 1, rozpraszanie energii nie występuje. Kontynuując przykład kuli, rozważmy sytuację, w której kula odbija się i powraca do położenia początkowego. Oznacza to, że stan kontaktu = 0,5. Ruch jest okresowy i powtarza się w nieskończoność.
- Gdy 0<e<1, rozpraszanie energii występuje przy każdym odbiciu. Ponownie korzystając z przykładu kuli, będzie się ona odbijać, ale przy każdym odbiciu wysokość, na jaką dociera kula, będzie się zmniejszać, aż zatrzyma się na płaszczyźnie. Wówczas stan kontaktu = 1. Poniższe warunki zapewniają funkcjonowanie prędkości przechwytywania.
Parametr Prędkość przechwytywania pomaga w ograniczeniu podczas rozwiązywania liczby niewielkich odbić przed powstaniem trwałego lub aktywnego kontaktu. Proces przechwytywania przebiega w następujący sposób:
- Zderzenie jest obliczane przy wszystkich współczynnikach przywrócenia z ustawionymi wartościami początkowymi.
- Prędkości względne po uderzeniu reprezentujące prędkości wznoszenia są porównywane z parametrem prędkości przechwytywania dla każdego zetknięcia.
- Jeśli wszystkie prędkości względne są większe od prędkości przechwytywania lub zerowe, uderzenie jest akceptowane i przeprowadzane jest rozwiązanie z wykorzystaniem nowych prędkości jako parametrów początkowych.
- Jeśli prędkość względna jest niższa niż prędkość przechwytywania, ale nie jest zerowa, dla tego kontaktu narzucany jest warunek e = 0, aby zmaksymalizować straty energii i uderzenie jest ponownie obliczane. Zderzenie jest akceptowane i dla wszystkich współczynników przywrócenia przywracane są ich wartości początkowe.
Kiedy można zmienić parametr?
Ten parametr można zmienić w następującym przypadku:
- Gdy istnieją złącza kontaktowe i symulacja jest powolna. Zatrzymaj symulację i utwórz wykres Prędkości przechwytywania. Jeśli parametr jest różny dla każdego przedziału czasowego (zmienia się w zakresie 0 - 1 - 2) lub jest równy 1, występuje problem z przechwytywaniem. W rozwiązywaniu podejmowana jest próba ustabilizowania stanu kontaktów, ale jest to proces złożony i czasochłonny. W takiej sytuacji zwiększ prędkość przechwytywania.
- Zmniejszenie wartości parametru nie daje żadnych korzyści.
Prędkość regularyzacji
W przypadku złączy kontaktowych wykorzystywane jest prawo rzeczywistego, nieliniowego tarcia Coulomba. W przypadku połączeń i połączeń 3D w celu uproszczenia procesu i uniknięcia warunku hiperstatycznego wykorzystywane jest regularyzowane prawo Coulomba. Można to przedstawić w następujący sposób:
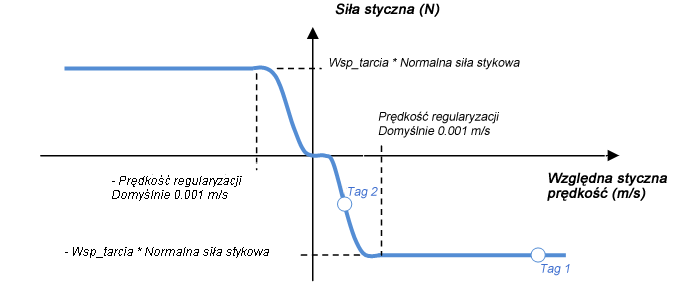
Regularyzacja jest sterowana za pomocą parametru regularyzacji prędkości.
Dla tego modelu w przypadkach kontaktu kontaktowego (lub kontaktu obrotowego), gdy względna prędkość styczna jest równa zero, siła styczna jest równa zero.
W przypadku tarcia w połączeniu z obrotowym stopniem swobody, siła styczna jest zastępowana stycznym momentem obrotowym (jednostka: Nm), względna, styczna prędkość jest prędkością obrotową (jednostka rad/s). Obie wartości są obliczane poprzez pomnożenie siły stycznej i podzielenie prędkości przesuwu przez promień połączenia.
|
Przykład 1 |
|
|
Połączenie sworzniowe o promieniu 10 mm jest prowadzone przy stałej prędkości „w” równej 10 rad/s. Siła (Fn) równa 20 N jest przykładana do połączenia prostopadle do jego osi obrotu. Wartość współczynnika tarcia (mu) określono na poziomie 0,1. W tym przypadku moment sił tarcia (Uf) w połączeniu można obliczyć w następujący sposób: |
|
|
? = r * w = 0,01 * 10 = 0,1 m/s ? > prędkość regularyzacji = 0,001 m/s => Uf = -mu * r * Fn = -0,1 * 0,01 * 20 = -0,02 Nm Patrz „oznaczenie 1” na regularyzowanym wykresie Coulomba. |
|
|
Przykład 2 |
|
|
Kontynuując powyższy przykład, ale przy prędkości (w) na poziomie 0,05 rad/s, moment sił tarcia (Uf) jest opisany wzorem: |
|
|
? = r * w = 0,01 * 0,05 = 0,0005 m/sm ? > prędkość regularyzacji = 0,001 m/s => Uf ≈ -mu * r * Fn/2 = -0,1 * 0,01 * 20/2 = -0,01 Nm Patrz „oznaczenie 2” na regularyzowanym wykresie Coulomba. |
|
Parametr Prędkość regularyzacji można zmienić w następujących sytuacjach:
- Symulacja jest powolna i w połączeniu z tarciem lub połączeniu kontaktowym 3D występują niewielkie drgania. Tarcie w połączeniu lub w połączeniu kontaktowym 3D jest źródłem znacznej sztywności modelu. W związku z tym podczas rozwiązywania zmniejszany jest przedział czasowy, aby zapewnić odpowiednią dokładność. Należy zmniejszyć sztywność => zwiększyć parametr prędkości regularyzacji o czynnik 5 (5e-3 m/s). Jeśli model nadal jest powolny, można kontynuować zwiększanie wartości parametru, używając wartość względnych modelu (niższych w porównaniu z prędkościami w modelu użytkownika).
- Nie należy znacznie zwiększać prędkości regularyzacji, ponieważ działa ona tylko w określonym przedziale wartości. Siła tarcia nigdy nie osiągnie swojej maksymalnej wartości. Pozwala to w sztuczny sposób ograniczyć zjawisko tarcia.
Sprawdzanie poprawności numerycznej
Przed przeanalizowaniem wyników symulacji, należy sprawdzić poprawność numeryczną symulacji, czyli jej niewrażliwość na parametry numeryczne. Aby wykonać sprawdzanie poprawności numerycznej, wykonaj następujące czynności:
- Uruchom symulację z zestawem parametrów numerycznych (dokładność zespołu i rozwiązywania, prędkość przechwytywania, prędkość regularyzacji oraz przedział czasowy) i zapisz ją.
- Każdy parametr podziel przez 10, uruchom symulację i zapisz ją.
- Wydrukuj wszystkie wyniki na jednym wykresie. Jeśli wszystkie wyniki są podobne, symulacja jest niewrażliwa na parametry numeryczne. Jeśli jest inaczej, wrażliwość może stanowić problem.
- Jeśli symulacja jest niewrażliwa, można przeanalizować wyniki.
- Jeśli symulacja jest wrażliwa na parametry numeryczne, użyj krzywych wyników, aby określić, który parametr numeryczny jest źródłem wrażliwości. Podziel parametr przez 10 i użyj otrzymanej wartości jako wartości nominalnej dla parametru numerycznego. Uruchom ponownie sprawdzanie poprawności od początku. Aby zaoszczędzić czas, możesz sprawdzić niewrażliwość dla jednego parametru.