Poniżej znajdują się uwagi dotyczące generowania typu połączenia stopy słupa w następujących sytuacjach.
Obciążenia — stopa słupa ze zdefiniowanymi podporami
Program Robot odczytuje reakcję podporową ze słupa. Jeśli układ lokalny płyty podstawy nie pokrywa się z kierunkami ustalonymi przez podporę (zobacz Reakcje R1 i R2 na rys. 3), to reakcje podpory są odzwierciedlan w układzie lokalnym płyty podstawy (reakcje Rh i Rv na rys. 3). Wynika to z założenia, że płyta podstawy jest zawsze prostopadła do trzonu słupa. W ten sposób przekształcony układ sił jest używany do obliczeń.
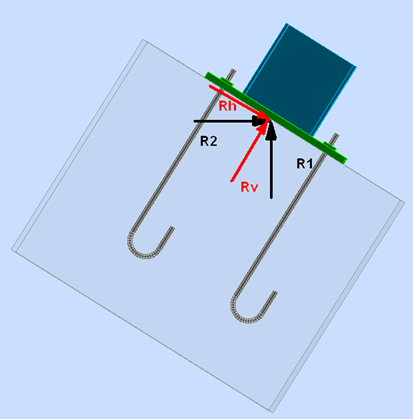
Rys. 3 Przeniesienie reakcji podpory (R1, R2) do układu lokalnego płyty podstawy (Rh, Rv).
Obciążenia — stopa słupa wspierana przez inne elementy konstrukcji
Jeśli w węźle nie została zdefiniowana podpora, to program Robot analizuje wszystkie elementy dochodzące do węzła i umieszczone powyżej płyty podstawy, po stronie trzonu słupa. Następnie oblicza wypadkowy układ wszystkich wewnętrznych sił pochodzących z tych elementów, uwzględniając siły skupione i momenty przyłożone do analizowanego węzła. W ten sposób obliczana wypadkowa siła jest przenoszona do układu lokalnego płyty podstawy.
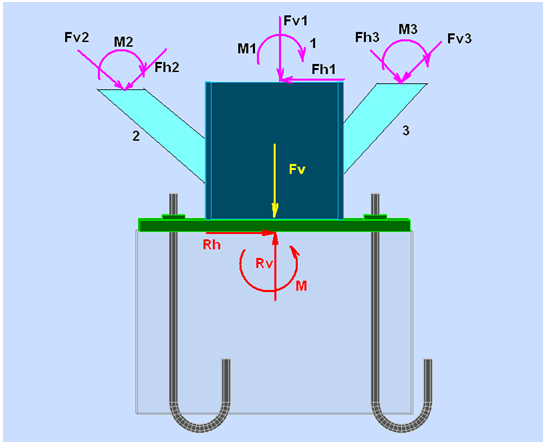
Rys. 4 Wszystkie siły wewnętrzne (Fvi, Fhi, Mi) i siły skupione (takie jak Fv) są sumowane, a odpowiednie siły wypadkowe są przenoszone do lokalnego układu płyty podstawy (Rh, Rv, M).
Zakłada się, że stopa słupa jest obciążona przez wszystkie elementy powyżej płyty podstawy (1, 2 i 3 na rys. 5), natomiast elementy umieszczone w płaszczyźnie płyty podstawy lub poniżej są ignorowane.
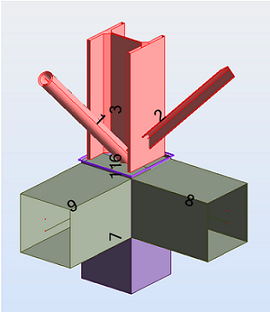
Rys. 5 Stopa słupa jest obciążona przez elementy: 1, 2 i 3 oraz podpierana przez elementy: 7, 8 i 9.
Automatyczna generacja
Program Robot automatycznie generuje stopę słupa w dwóch przypadkach:
- Jeśli wybrano tylko jeden podpierany element i węzeł, w którym stopa słupa powinna zostać zdefiniowana (niezależnie od tego, czy podpora w tym węźle jest zdefiniowana, czy nie) — zobacz Rys. 6
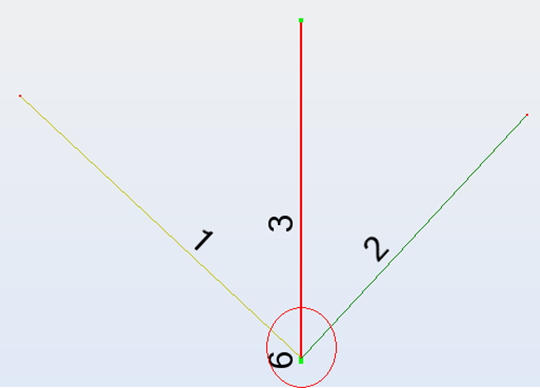
Rys. 6 Wybrane są pręt i węzeł — program Robot spowoduje wygenerowanie stopy słupa.
Uwaga: Wyjątkiem jest sytuacja, kiedy wybranym węzłem jest niewspierany koniec wspornika (inne elementy prętowe nie stykają się z tym węzłem). Wówczas stop słupa nie zostanie wygenerowana (zobacz rys. 7).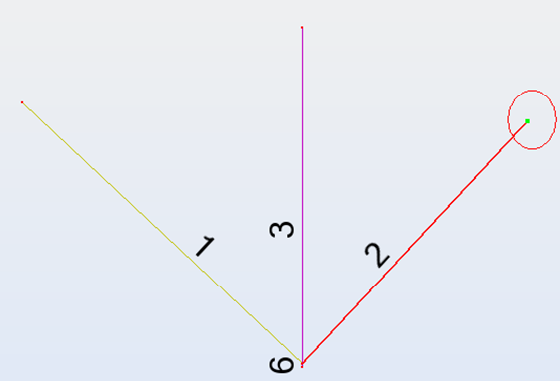
Rys. 7 Niewspierany koniec — stopa słupa nie zostanie wygenerowana.
- Jeśli kilka elementów styka się z węzłem i tylko jeden z nich jest ze stali, to pozostałe są z innych materiałów, jak na rys. 8., stopa słupa jest generowana automatycznie dla elementów stalowych.

Rys. 8 Pręt 3 jest jedynym elementem stalowym; pręty 7, 8 i 9 są elementami żelbetowymi; stopa słupa zostanie wygenerowana dla pręta 3.