Este exemplo mostra como dividir o grupo de colisão no arquivo Robot_One_CGroup.mtd em quatro grupos de colisão.
Você precisa especificar um atributo NAME para os componentes de eixo A, B, D e F, pois o PowerMill cria um novo grupo de colisão para cada componente de eixo com um atributo NAME.
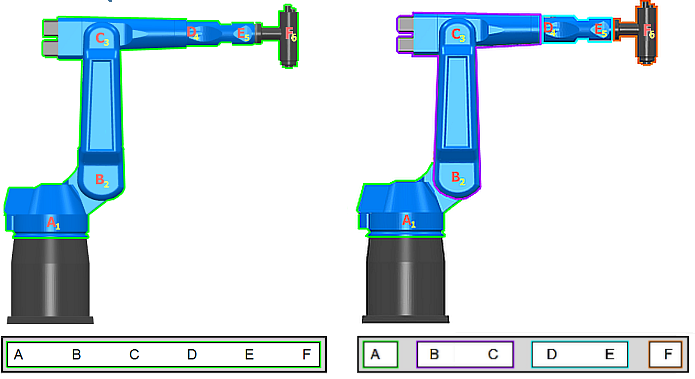
Componentes de eixo sem um atributo NAME são incluídos no grupo de colisão associado ao componente de eixo anterior com um atributo NAME. Se não especificarmos atributos NAME para os componentes de eixo C e E, C é incluído no mesmo grupo de colisão que B, e E com D.
Divida o grupo de colisão em quatro grupos de colisão:
- Abra o arquivo Robot_One_CGroup.mtd num editor de XML. Este exemplo utiliza o NotePad ++.
O comentário <! --The arm is controlled by 6 rotary axes --> indica o início da cadeia cinemática. Abaixo do comentário, os seis componentes de eixo que constituem o robô são definidos numa seção própria (referida como um elemento pai em linguagem XML).
Cada seção de componente de eixo começa com o elemento filho <machine_part>
 . Você pode identificar qual componente de eixo a seção define pelo endereço de eixo
. Você pode identificar qual componente de eixo a seção define pelo endereço de eixo  .
.

- Edite o elemento <machine_part> associado ao eixo A inserindo o atributo NAME="Shoulder", de forma que o elemento seja exibido como: <machine_part NAME="Shoulder">.
- Edite o elemento <machine_part> associado ao eixo B inserindo o atributo NAME="Upperarm", de forma que o elemento seja exibido como: <machine_part NAME="Upperarm">.
- Edite o elemento <machine_part> associado ao eixo D inserindo o atributo NAME="Forearm", de forma que o elemento seja exibido como: <machine_part NAME="Forearm">.
- Edite o elemento <machine_part> associado ao eixo F inserindo o atributo NAME="Head", de forma que o elemento seja exibido como: <machine_part NAME="Head">.
Os elementos <machine_part> para os componentes de eixo C e E não devem apresentar atributos NAME.
- Salve o arquivo .mtd.
Inserindo atributos NAME nos elementos <machine_part>, você dividiu o grupo de colisão existente em quatro grupos de colisão:
- Shoulder (contendo o componente de eixo A)
- Upperarm (contendo os componentes de eixo B e C)
- Forearm (contendo os componentes de eixo D e E)
- Head (contendo o componente de eixo F)