指定组织的草图设置以获得绘图帮助。
DSETTINGS(命令)
菜单:。
概要
可使用以下类别。
- 捕捉和栅格
- 极轴追踪
- 对象捕捉
- 三维对象捕捉
- 动态输入
选项列表
将显示以下选项。
“捕捉和栅格”选项卡(“草图设置”对话框)
指定捕捉和栅格设置。
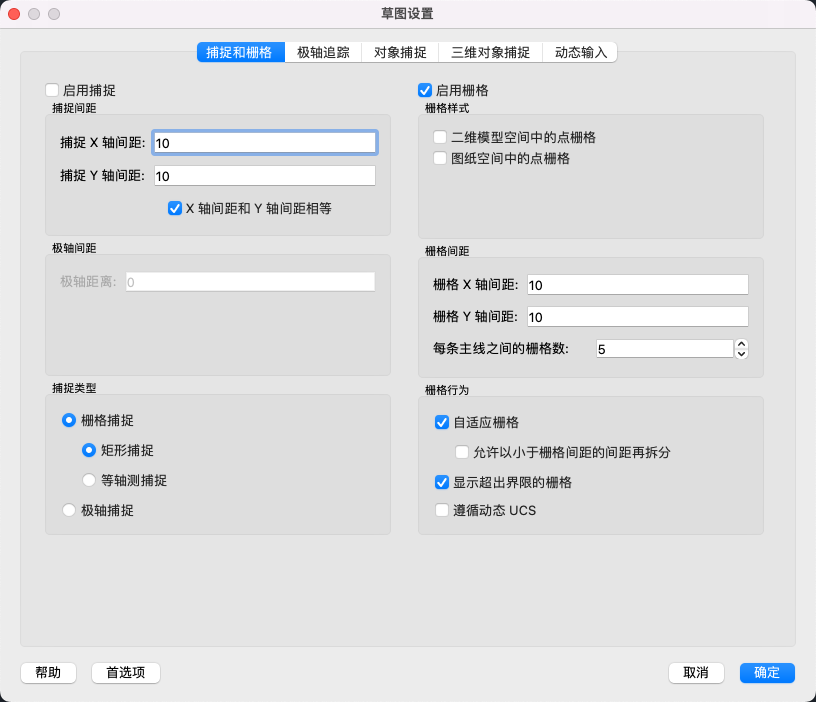
启用捕捉
打开或关闭捕捉模式。也可以通过单击状态栏上的“捕捉”,按 F9 键,或使用 SNAPMODE 系统变量,来打开或关闭捕捉模式。
捕捉间距
控制捕捉位置的不可见矩形栅格,以限制光标仅在指定的 X 和 Y 间隔内移动。
- 捕捉 X 轴间距
-
指定 X 方向的捕捉间距。间距值必须为正实数。(SNAPUNIT 系统变量)
- 捕捉 Y 轴间距
-
指定 Y 方向的捕捉间距。间距值必须为正实数。(SNAPUNIT 系统变量)
- X 和 Y 间距相等
-
为捕捉间距和栅格间距强制使用同一 X 和 Y 间距值。捕捉间距可以与栅格间距不同。
极轴间距
控制 PolarSnap™(PolarSnap)增量距离。
- 极轴距离
-
选定“捕捉类型和样式”下的“PolarSnap”时,设定捕捉增量距离。如果该值为 0,则 PolarSnap 距离采用“捕捉 X 轴间距”的值。“极轴距离”设置与极坐标追踪和/或对象捕捉追踪结合使用。如果两个追踪功能都未启用,则“极轴距离”设置无效。(POLARDIST 系统变量)
捕捉类型
设定捕捉样式和捕捉类型。
- 栅格捕捉
-
设定栅格捕捉类型。如果指定点,光标将沿垂直或水平栅格点进行捕捉。(SNAPTYPE 系统变量)
- 矩形捕捉:
-
将捕捉样式设定为标准“矩形”捕捉模式。当捕捉类型设定为“栅格”并且打开“捕捉”模式时,光标将捕捉矩形捕捉栅格。(SNAPSTYL 系统变量)
- 等轴测捕捉
-
将捕捉样式设定为“等轴测”捕捉模式。当捕捉类型设定为“栅格”并且打开“捕捉”模式时,光标将捕捉等轴测捕捉栅格。(SNAPSTYL 系统变量)
- PolarSnap
-
将捕捉类型设定为“PolarSnap”。如果启用了“捕捉”模式并在极轴追踪打开的情况下指定点,光标将沿在“极轴追踪”选项卡上相对于极轴追踪起点设置的极轴对齐角度进行捕捉。(SNAPTYPE 系统变量)
启用栅格
打开或关闭栅格。也可以通过单击状态栏上的“栅格”,按 Fn-F7 键,或使用 GRIDMODE 系统变量,来打开或关闭栅格模式。
栅格样式
在二维上下文中设定栅格样式。也可以使用 GRIDSTYLE 系统变量设定栅格样式。
- 二维模型空间中的点栅格
-
将二维模型空间的栅格样式设定为点栅格。(GRIDSTYLE 系统变量)
- 图纸空间中的点栅格
-
将图纸和布局的栅格样式设定为点栅格。(GRIDSTYLE 系统变量)
栅格间距
控制栅格的显示,有助于直观显示距离。
- 栅格 X 间距
-
指定 X 方向上的栅格间距。如果该值为 0,则栅格采用“捕捉 X 轴间距”的数值集。(GRIDUNIT 系统变量)
- 栅格 Y 间距
-
指定 Y 方向上的栅格间距。如果该值 为 0,则栅格采用“捕捉 Y 轴间距”的数值集。(GRIDUNIT 系统变量)
- 每条主线的栅格数
-
指定主栅格线相对于次栅格线的频率。将 GRIDSTYLE 设定为 0(零)时,将显示栅格线而不显示栅格点。 (GRIDMAJOR 系统变量)
栅格行为
控制将 GRIDSTYLE 设定为 0(零)时,所显示的栅格线的外观。
- 自适应栅格
-
缩小时,限制栅格密度。(GRIDDISPLAY 系统变量)
允许以小于栅格间距的间距再拆分:
放大时,生成更多间距更小的栅格线。主栅格线的频率确定这些栅格线的频率。(GRIDDISPLAY 和 GRIDMAJOR 系统变量)
- 显示超出界线的栅格
-
显示超出 LIMITS 命令指定区域的栅格。(GRIDDISPLAY 系统变量)
- 跟随动态 UCS
-
更改栅格平面以跟随动态 UCS 的 XY 平面。(GRIDDISPLAY 系统变量)
“极轴追踪”选项卡(“草图设置”对话框)
控制自动追踪设置。
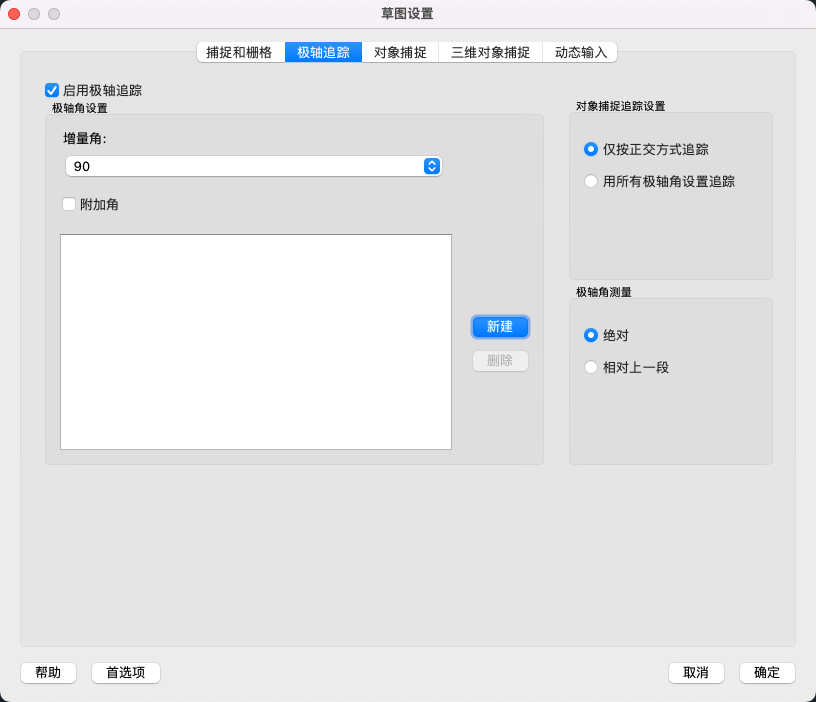
启用极轴追踪
打开或关闭极轴追踪。也可以通过按 F10 键或使用 AUTOSNAP 系统变量,来打开或关闭极轴追踪。
极轴角设置
设定极轴追踪的对齐角度。(POLARANG 系统变量)
- 增量角
-
设定用来显示极轴追踪对齐路径的极轴角增量。可以从列表中选择常用角度 90、45、30、22.5、18、15、10 或 5 度。(POLARANG 系统变量)
- 附加角
-
对极轴追踪使用列表中的任何一种附加角度。“附加角”复选框同样受 POLARMODE 系统变量控制。附加角列表同样受 POLARADDANG 系统变量控制。
注: 附加角度是绝对的,而非增量的。 - 角度列表
-
如果选定“附加角”,将列出可用的附加角度。要添加新的角度,请单击“新建”。要删除现有的角度,请单击“删除”。(POLARADDANG 系统变量)
- 新建
-
显示“添加新角度”对话框。可以添加最多 10 个附加极轴追踪对齐角度。
注: 添加分数角度之前,必须将 AUPREC 系统变量设置为合适的十进制精度以避免不需要的舍入。例如,如果 AUPREC 的值为 0(默认值),则输入的所有分数角度将舍入为最接近的整数。 - 删除
-
删除选定的附加角度。
对象捕捉追踪设置
设定对象捕捉追踪选项。
- 仅按正交方式追踪
-
当对象捕捉追踪打开时,仅显示已获得的对象捕捉点的正交(水平/垂直)对象捕捉追踪路径。(POLARMODE 系统变量)
- 用所有极轴角设置追踪
-
将极轴追踪设置应用于对象捕捉追踪。使用对象捕捉追踪时,光标将从获取的对象捕捉点起沿极轴对齐角度进行追踪。(POLARMODE 系统变量)
极轴角测量
设定测量极轴追踪对齐角度的基准。
- 绝对
-
根据当前用户坐标系 (UCS) 确定极轴追踪角度。
- 相对上一段
-
根据上一个绘制线段确定极轴追踪角度。
“对象捕捉”选项卡(“草图设置”对话框)
控制对象捕捉设置。使用执行对象捕捉设置(也称为对象捕捉),可以在对象上的精确位置指定捕捉点。选择多个选项后,将应用选定的捕捉模式,以返回距离靶框中心最近的点。按 TAB 键以在这些选项之间循环。
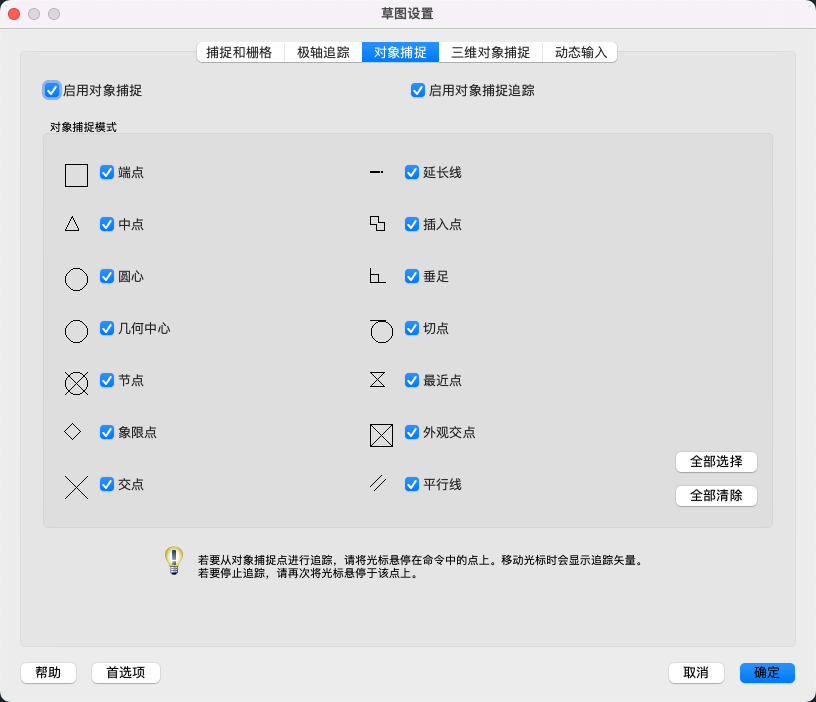
启用对象捕捉
打开或关闭执行对象捕捉。当对象捕捉打开时,在“对象捕捉模式”下选定的对象捕捉处于活动状态。(OSMODE 系统变量)
启用对象捕捉追踪
打开或关闭对象捕捉追踪。使用对象捕捉追踪,在命令中指定点时,光标可以沿基于其他对象捕捉点的对齐路径进行追踪。要使用对象捕捉追踪,必须打开一个或多个对象捕捉。(AUTOSNAP 系统变量)
对象捕捉模式
列出可以在执行对象捕捉时打开的对象捕捉模式。
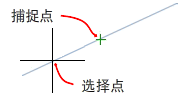
- 端点
-
捕捉到圆弧、椭圆弧、直线、多行、多段线线段、样条曲线、面域或射线最近的端点,或捕捉跟踪、实体或三维面域的最近角点。
- 中点
-
捕捉到圆弧、椭圆、椭圆弧、直线、多行、多段线线段、面域、实体、样条曲线或参照线的中点。
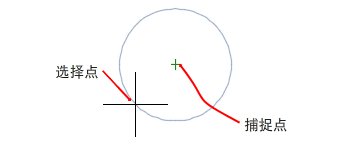
- 中心
-
捕捉到圆弧、圆、椭圆或椭圆弧的中心点。
- 节点
-
捕捉到点对象、标注定义点或标注文字原点。

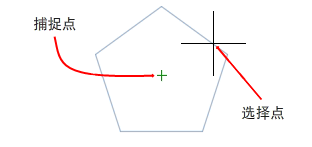
- 几何中心
-
捕捉到任意闭合多段线和样条曲线的质心。
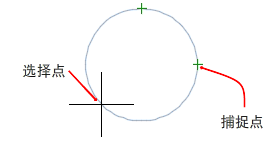
- 象限
-
捕捉到圆弧、圆、椭圆或椭圆弧的象限点。
- 交点
-
捕捉到圆弧、圆、椭圆、椭圆弧、直线、多行、多段线、射线、面域、样条曲线或参照线的交点。“延伸交点”不能用作执行对象捕捉模式。
“交点”和“延伸交点”不能和三维实体的边或角点一起使用。
注: 如果同时打开“交点”和“外观交点”执行对象捕捉,可能会得到不同的结果。 - 延伸
-
当光标经过对象的端点时,显示临时延长线或圆弧,以便用户在延长线或圆弧上指定点。
注: 在透视视图中进行操作时,不能沿圆弧或椭圆弧的延伸线进行追踪。 - 插入点
-
捕捉到属性、块、形或文字的插入点。
- 垂直
-
捕捉圆弧、圆、椭圆、椭圆弧、直线、多线、多段线、射线、面域、实体、样条曲线或构造线的垂足。
当正在绘制的对象需要捕捉多个垂足时,将自动打开“递延垂足”捕捉模式。可以用直线、圆弧、圆、多段线、射线、参照线、多行或三维实体的边作为绘制垂直线的基础对象。可以用“递延垂足”在这些对象之间绘制垂直线。当靶框经过“递延垂足”捕捉点时,将显示 AutoSnap 工具提示和标记。
- 相切
-
捕捉到圆弧、圆、椭圆、椭圆弧或样条曲线的切点。当正在绘制的对象需要捕捉多个垂足时,将自动打开“递延垂足”捕捉模式。可以使用“递延相切”来绘制与圆弧、多段线圆弧或圆相切的直线或构造线。当靶框经过“递延相切”捕捉点时,将显示标记和 AutoSnap 工具提示。
 注: 当用“自”选项结合“相切”捕捉模式来绘制除开始于圆弧或圆的直线以外的对象时,第一个绘制的点是与在绘图区域最后选定的点相关的圆弧或圆的切点。
注: 当用“自”选项结合“相切”捕捉模式来绘制除开始于圆弧或圆的直线以外的对象时,第一个绘制的点是与在绘图区域最后选定的点相关的圆弧或圆的切点。 - 最近点
-
捕捉到圆弧、圆、椭圆、椭圆弧、直线、多行、点、多段线、射线、样条曲线或参照线的最近点。
- 外观交点
-
捕捉不在同一平面但在当前视图中看起来可能相交的两个对象的视觉交点。
“延伸外观交点”不能用作执行对象捕捉模式。“外观交点”和“延伸外观交点”不能和三维实体的边或角点一起使用。
注: 如果同时打开“交点”和“外观交点”执行对象捕捉,可能会得到不同的结果。 - 平行
-
将直线段、多段线线段、射线或构造线限制为与其他线性对象平行。指定线性对象的第一点后,请指定平行对象捕捉。与在其他对象捕捉模式中不同,用户可以将光标和悬停移至其他线性对象,直到获得角度。然后,将光标移回正在创建的对象。如果对象的路径与上一个线性对象平行,则会显示对齐路径,用户可将其用于创建平行对象。
注: 使用平行对象捕捉之前,请关闭 ORTHO 模式。在平行对象捕捉操作期间,会自动关闭对象捕捉追踪和 PolarSnap。使用平行对象捕捉之前,必须指定线性对象的第一点。 - 全部选择
-
打开所有对象捕捉模式。
- 全部清除
-
关闭所有对象捕捉模式。
“三维对象捕捉”选项卡(“草图设置”对话框)
控制三维对象的执行对象捕捉设置。使用执行对象捕捉设置(也称为对象捕捉),可以在对象上的精确位置指定捕捉点。选择多个选项后,将应用选定的捕捉模式,以返回距离靶框中心最近的点。按 TAB 键以在这些选项之间循环。

打开三维对象捕捉
打开和关闭三维对象捕捉。当对象捕捉打开时,在“三维对象捕捉模式”下选定的三维对象捕捉处于活动状态。(3DOSMODE 系统变量)
三维对象捕捉模式
列出三维对象捕捉模式。
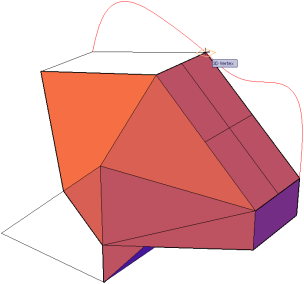
- 顶点
-
捕捉到三维对象的最近顶点。
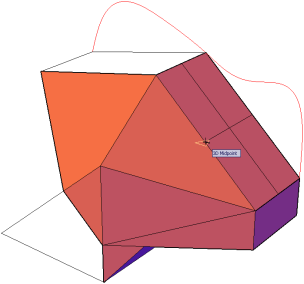
- 边中点
-
捕捉到面边的中点。
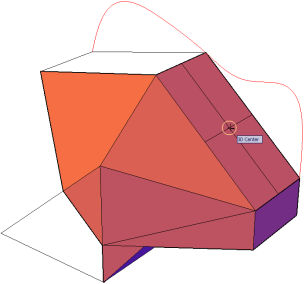
- 面中心
-
捕捉到面的中心。
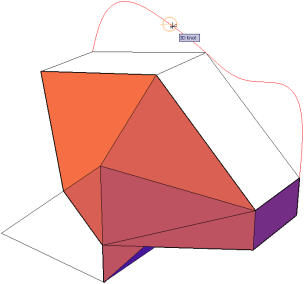
- 节点
-
捕捉到样条曲线上的节点。
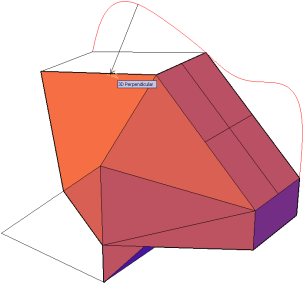
- 垂直
-
捕捉到垂直于面的点。
- 最靠近面
-
捕捉到最靠近三维对象面的点。
- 全部选择
-
打开所有三维对象捕捉模式。
- 全部清除
-
关闭所有三维对象捕捉模式。
“动态输入”选项卡(“草图设置”对话框)
控制指针输入、标注输入、动态提示以及绘图工具提示的外观。
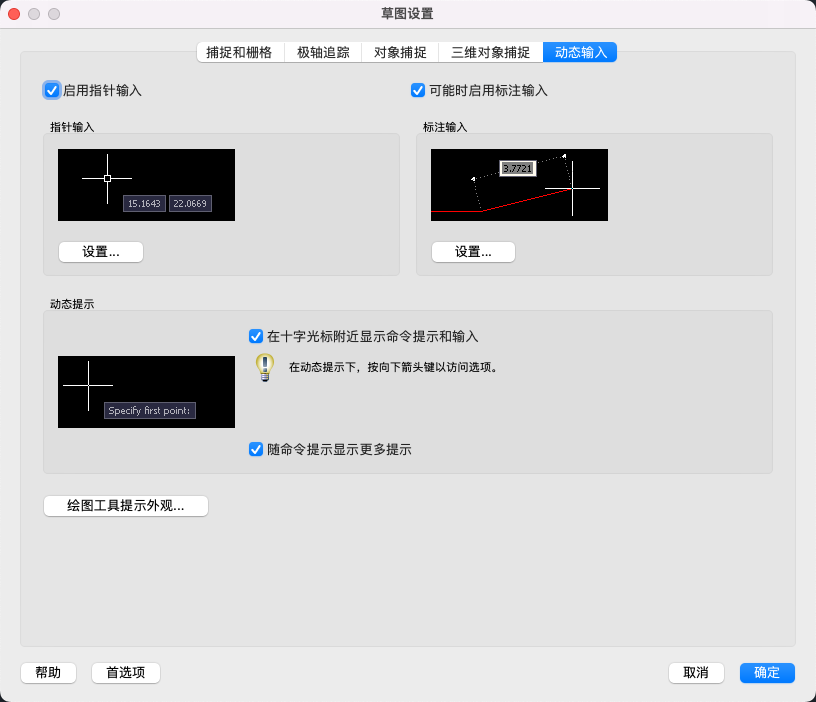
启用指针输入
打开指针输入。如果同时打开指针输入和标注输入,则标注输入在可用时将取代指针输入。(DYNMODE 系统变量)
指针输入
工具提示中的十字光标位置的坐标值将显示在光标旁边。命令提示用户输入点时,可以在工具提示(而非命令窗口)中输入坐标值。
- 预览区域
-
显示指针输入的样例。
- 设置
-
显示“指针输入设置”对话框。
启用尺寸输入(如果适用)
打开标注输入。标注输入不适用于某些提示输入第二个点的命令。(DYNMODE 系统变量)
标注输入
当命令提示用户输入第二个点或距离时,将显示标注和距离值与角度值的工具提示。标注工具提示中的值将随光标移动而更改。可以在工具提示中输入值,而不用在命令行上输入值。
- 预览区域
-
显示标注输入的样例。
- 设置
-
显示“标注输入设置”对话框。
动态提示
需要时将在光标旁边显示工具提示中的提示,以完成命令。可以在工具提示中输入值,而不用在命令行上输入值。
- 预览区域
-
显示动态提示的样例。
- 在十字光标旁边显示命令提示和命令输入
-
显示“动态输入”工具提示中的提示。(DYNPROMPT 系统变量)
- 显示带有命令提示的其他提示
-
控制是否显示使用 Shift 和 Ctrl 键进行夹点操作的提示。(DYNINFOTIPS 系统变量)
设计工具提示外观
显示“工具提示外观”对话框。