Bei der inversen Kinematiklösung von Biped sind bei jedem Key auf den Keyframe-Spuren für Arme und Beine drei Parameter eingestellt.
Während sich die Glieder durch die Keys bewegen, passiert Folgendes:
- IK-Verschmelzung Legt für die Bewegungsinterpolation eine Mischung aus vorwärtsgerichteter und inverser Kinematik fest. Dadurch können Sie Schwingbewegungen mit über Hand oder Fuß gesteuerten Bewegungen kombinieren. Ein Beispiel für vorwärtsgerichtete Kinematik ist es, zum Bewegen der Hand den Arm zu drehen. Ein Beispiel für inverse Kinematik wäre, zum Bewegen des Arms die Position der Hand zu verwenden. Die Vorgabeverschmelzung ist 0,0 bzw. vollständig vorwärtsgerichtete Kinematik. Bei einer vollständig inversen Kinematik liegt die IK-Verschmelzung bei 1,0.
- "Körper" oder "Objekt" bestimmt den Referenzkoordinatenraum des IK-Pfads. Dadurch können Sie den IK-Pfad mit dem Körper der Figur verschieben oder vorübergehend die Hände oder Füße so anhängen, dass sie anderen Objekten folgen. Die Vorgabe ist "Körper".
- Mit vorh. IK-Key verbinden definiert, ob der Key zum vorherigen Key gehört (das heißt, ob er die gleiche Referenzposition wie der vorherige Key hat).
Biped bietet drei automatische Verfahren zum Einstellen dieser Parameter. Durch das Einstellen von Aufsetz-, Gleit- oder freien Keys werden Keys mit unterschiedlichen Kombinationen dieser drei Parameter erstellt.
- Durch Einstellen eines Aufsetz-Keys wird ein Key mit einem IK-Verschmelzungswert von 1,0 erstellt, für den die Optionen "Objekt" und "Mit vorh. IK-Key verbinden" aktiviert sind.
- Durch Einstellen eines Gleit-Keys wird ein Key mit einem IK-Verschmelzungswert von 1,0 erstellt, für den die Optionen "Objekt" und "Mit vorh. IK-Key verbinden" deaktiviert sind.
- Durch Einstellen eines freien Keys wird ein Key mit einem IK-Verschmelzungswert von 0 erstellt, für den die Option "Körper" aktiviert ist. "Mit vorh. IK-Key verbinden" ist deaktiviert.
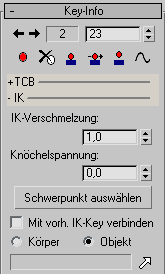
IK-Verschmelzung
Das Steuerelement "IK-Verschmelzung" befindet sich im Rollout Key-Info; es wird angezeigt, wenn Sie die IK-Abtrennungsleiste erweitern. Die "IK-Verschmelzung" wird im Keyframe-Modus eingestellt.
IK-Gruppenparameter
Die IK-Verschmelzung kann pro Key für beliebige Arm- oder Beinspuren festgelegt werden. Über die Einstellung "IK-Verschmelzung" wird festgelegt, ob sich am jeweiligen Key ein Arm oder Bein über inverse Kinematik, vorwärtsgerichtete Kinematik oder eine Mischung aus beiden kinematischen Lösungen hindurchbewegt.
Mit einem IK-Verschmelzungswert von 0,0 wird vollständig vorwärtsgerichtete Kinematik festgelegt. Der Arm (oder das Bein) wird durch Interpolation der Drehungen der Gelenke an den Keys bewegt. Die Hand (oder der Fuß) bewegt sich weitgehend entlang geschwungener Kreisbögen mit, und die Bewegung wird durch das scheinbare Drehen an den Gelenken ausgelöst.
Ein IK-Verschmelzungswert von 1,0 bedeutet vollständig inverse Kinematik, wobei die Hand (oder der Fuß) als Endeffektor verwendet wird. Über die Keys der Hand wird ein Spline-Pfad berechnet, und die Hand bewegt sich entlang diesem Spline. Es werden Gelenkwinkel für den restlichen Arm berechnet, durch die sich die Hand entsprechend dem Spline bewegen kann. Die Bewegung wird in diesem Fall scheinbar von der Hand (oder dem Fuß) geleitet.
Mit einem IK-Verschmelzungswert zwischen 0,0 und 1,0 wird eine Kombination von inverser und vorwärtsgerichteter Kinematik festgelegt. Wenn dieser Wert näher an 0,0 liegt, ist die vorwärtsgerichtete Kinematik in der Lösung stärker gewichtet. Wenn er näher bei 1,0 liegt, ist die inverse Kinematik stärker gewichtet.
Es wird empfohlen, die vorwärtsgerichtete Kinematik zu verwenden, wenn Sie die Arme schwingen lassen möchten, zum Beispiel bei einem gehenden Biped. Im Falle eines Boxers, dessen Hand bei Schlägen einem gerichteten Pfad folgen sollte, empfiehlt sich jedoch die inverse Kinematik.
So legen Sie den Wert der IK-Verschmelzung für einen Key fest:
-
 Wählen Sie eine einzelne Arm- oder Beinspur aus, indem Sie einen oder mehrere Teile eines Biped-Arms oder -Beins auswählen.
Wählen Sie eine einzelne Arm- oder Beinspur aus, indem Sie einen oder mehrere Teile eines Biped-Arms oder -Beins auswählen.
Das Zahlenauswahlfeld "IK-Verschmelzung" und die anderen Steuerelemente im Bereich "IK" sind nur dann aktiviert, wenn eine einzelne Arm- oder Beinspur ausgewählt ist.
-
 Legen Sie einen Key fest, falls noch keiner festgelegt wurde.
Legen Sie einen Key fest, falls noch keiner festgelegt wurde.
- Legen Sie den gewünschten Wert für "IK-Verschmelzung" fest.
Körper- und Objektoptionen
Vorgabemäßig berechnet Biped die kinematische Lösung mit dem Koordinatensystem des Massenmittelpunkts der Biped-Figur oder dem Koordinatensystem des Körpers. Dies bedeutet, dass der IK-Pfad der Hand (oder des Fußes) bei der Bewegung mit der Figur übertragen und gedreht wird. Zum Beispiel verläuft die Bewegungsbahn der Hand eines Boxers immer im Verhältnis zum Antäuschen, Tänzeln und Drehen des Körpers des Boxers.
Mit der Option "Objekt" werden dynamische Verbindungen zwischen den Gliedern und anderen Objekten in der Szene animiert.
Das Steuerelement "IK-Verschmelzung" wird aktiv, wenn ein Arm- oder Bein-Key eines Bipeds (Hand oder Fuß) aktiv ist.
- Der Wert 0 bei aktiviertem "Körper" bedeutet vorwärtsgerichtete Kinematik oder den normalen Biped-Raum.
- Der Wert 1 bei aktiviertem "Körper" bedeutet inverse Kinematik und verursacht eine eher geradlinige Bewegung zwischen Biped-Keys.
- Wenn der Wert 1 ausgewählt, die Option "Objekt" aktiviert, aber kein IK-Objekt angegeben ist, wird das Glied vollständig in den Weltkoordinatenraum gelegt. Hierdurch können Sie gleitende Füße in einer Freiform-Animation steuern.
- Der Wert 1 bei aktivierter Option "Objekt" und Angabe eines IK-Objekts platziert das Biped-Glied im Koordinatenraum des ausgewählten Objekts. Das Biped-Glied folgt dem ausgewählten Objekt.
Mit vorh. IK-Key verbinden
Mit dieser IK-Beschränkung wird definiert, ob ein Schritt gleitet oder aufgesetzt wird. Wenn die Option "Mit vorh. IK-Key verbinden" aktiviert ist, behält der Fuß des Bipeds eine Referenzposition zum vorherigen Key bei. Dies bewirkt, dass der Fuß auf dem Boden aufgesetzt bleibt. Wenn "Mit vorh. IK-Key verbinden" während eines Schritts deaktiviert ist, kann der Fuß an eine neue Stelle bewegt werden. Dadurch entsteht ein Gleitschritt.
"Mit vorh. IK-Key verbinden" führt auch dazu, dass die Hände des Bipeds im Raum verankert werden. Verwenden Sie für die Hände die Option "Aufsetz-Key einstellen", um deren Position im Raum zu verankern.