Jede Werkzeugmaschine kann anhand ihres mathematisches Modells beschrieben werden, dem so genannten kinematischen Modell der Maschine. Dieses Modell enthält Informationen, anhand derer der Autodesk Manufacturing Post Processor Utility aus der CLDATA-Datei erhaltene Koordinaten (Modellkoordinaten) in Koordinaten einer Werkzeugmaschine (Maschinenkoordinaten) transformiert. Diese Transformation wird als inverses kinematisches Problem bezeichnet.
Die Lösung dieses Problems ist eine der wichtigsten Aufgaben des Postprozessors und ist beim Verarbeiten von Mehrachsen-Trajektorien komplexer. Zur Darstellung der Maschinenkinematik verwendet der Autodesk Manufacturing Post Processor Utility das Machine Tool Data Format, auch MTD-Format genannt. In diesem Format dargestellte Maschinenkinematik wird als MTD-Modell bezeichnet. Die MTD-basierte Maschinenkinematikdarstellung ist wesentlich effektiver als die Darstellung der Kinematik durch 3-Achsen-, 4-Achsen- und 5-Achsen-Klassen und ermöglicht Ihnen zudem das Erstellen von Programmen für beliebige Konfigurationen, darunter 6-Achsen-Maschinen mit drei Drehachsen.
Die Geometrie der Maschine kann entweder durch eine in einem CAD-System definierte *.dmt-Dreiecksdatei oder durch parametrische Primitive (Quader und Konus) definiert werden.
Beim Erstellen eines eigenen MTD-Modells empfiehlt es sich, mit einem vorhandenen MTD-Modell zu beginnen und dieses zu bearbeiten.
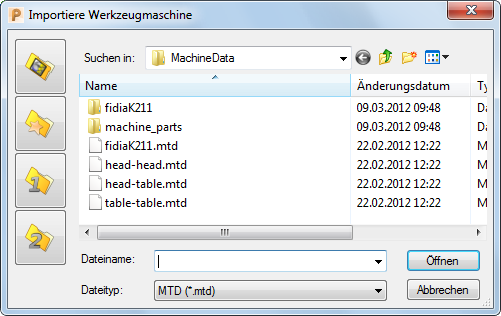
Durch Klicken auf die WKZ-Maschine-Registerkarte > Datei-Gruppe > Import werden alle bestehenden MTD Dateien angezeigt:
Weitere Informationen zur Kollisionsprüfung finden Sie unter .mtd-Datei bearbeiten zur Verbesserung der Kollisionsprüfung.