Use the Point-Cloud tab > Edit panel > Register option to merge overlapping point-clouds measured from two different locations. The resulting cloud is merged into a common coordinate system so the points can be used together.
To register two point-clouds:
- Click Point-Cloud tab > Select panel > Pick Mode > Pairs, and select three or more points from each point-cloud to identify where they overlap.
- Click Point-Cloud tab > Edit panel > Register. The
Registration of Point-Clouds dialog is displayed.
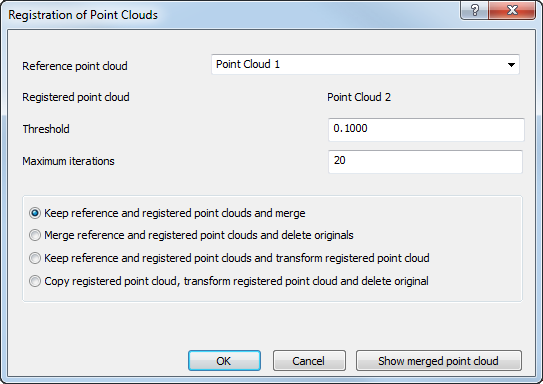
- In the Reference point-cloud list, select the point-cloud whose coordinate system you want to use to register the point-clouds. The second point-cloud is moved relative to this item and is displayed as the Registered point-cloud.
- In the Threshold box, enter the movement limit for the transformation calculations. When the movement between the previous and the current calculations is smaller than the specified value, the registration stops.
- In the Maximum iterations box, enter the maximum number of calculations you want PowerInspect to perform.
- Choose an option to specify how you want to treat the original point-clouds. Select:
- Keep reference and registered point-clouds and merge to leave the original point-clouds unchanged, and create a new point-cloud that contains the points of both originals.
- Merge reference and registered point-clouds and delete originals to delete the original point-clouds, and create a new point-cloud that contains the points of both originals.
- Keep reference and registered point-clouds and transform registered point-cloud to move the registered point-cloud relative to the reference point-cloud.
- Copy registered point-cloud, transform registered point-cloud and delete original to create a copy of the registered point-cloud, and move the copy relative to the reference point-cloud.
- To check the registration before saving your changes, click Show merged point-cloud.
- Click
OK to close the dialog and register the point-clouds.
Registration is a two-stage process: PowerInspect first creates an approximate alignment between the point-clouds; it then uses the point pairs you selected to perform a best-fit transformation. Each iteration of the process is shown at the bottom left of the Registration of Point-Clouds dialog; you can stop this process at any time by pressing the Esc key.
If the registration process is successful, the inspection sequence is updated, and the results are displayed in the CAD view. For example: