![]()
-
Sélectionnez le bipède >
 groupe de fonctions Mouvement > panneau déroulant Bipède >
groupe de fonctions Mouvement > panneau déroulant Bipède >  (Mode Pas) > panneau déroulant Création de pas >
(Mode Pas) > panneau déroulant Création de pas >  (Exécuter) >
(Exécuter) >  (Créer des pas multiples) > boîte de dialogue Créer des pas multiples : Exécuter
(Créer des pas multiples) > boîte de dialogue Créer des pas multiples : Exécuter
Cette boîte de dialogue s'affiche lorsque l'option Exécuter est sélectionnée dans le panneau déroulant Création de pas. Ensuite, cliquez sur Créer des pas multiples.
Interface
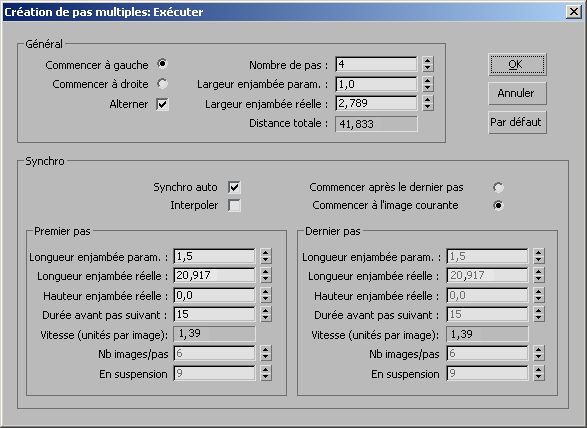
Zone Général
- Commencer à gauche Débute la séquence de pas par un pas gauche.
- Commencer à droite Débute la séquence de pas par un pas droit.
- Alterner
- Fait alterner les pas gauches et droits. Lorsque cette case n'est pas cochée, les pas sont tous situés du même côté, de sorte que le bipède saute à cloche-pied.
- Nombre de pas
- Détermine le nombre de pas à créer.
- Largeur enjambée param.
- Définit la largeur d'enjambée en tant que pourcentage de la largeur du bassin.
Une valeur de 1 produit une enjambée de largeur égale à celle du bassin. Une valeur de 3 produit une enjambée plus importante créant un effet de dandinement. Lorsque vous modifiez la valeur de ce paramètre, vous modifiez automatiquement celle du paramètre Largeur enjambée réelle.
Paramétrique décrit le paramètre en termes d'anatomie du bipède, alors que Réelle exprime sa valeur en unités 3ds Max.
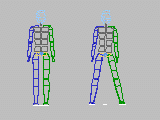
Largeur enjambée = 1 et Largeur enjambée = 3
- Largeur enjambée réelle
- Définit la largeur d'enjambée en unités de modélisation. Lorsque vous modifiez la valeur de ce paramètre, vous modifiez automatiquement celle du paramètre Largeur enjambée param.
- Distance totale
- Affiche la distance totale franchie en un pas avec les paramètres actuels. Cette valeur ne peut pas être modifiée directement.
Zone Synchro
- Synchro auto
-
Définit automatiquement les paramètres de synchronisation.
La synchronisation automatique concerne les paramètres suivants en mode Course :
- Nb images/pas, En suspension
Lorsque la case Synchro auto est cochée, ces paramètres sont automatiquement affectés de valeurs réalistes. Vous contrôlez la séquence de pas à l'aide des paramètres Longueur enjambée et Durée avant pas suivant.
Lorsque la case Synchro auto n'est pas cochée, vous pouvez contrôler la séquence de pas au moyen des paramètres de synchronisation de l'allure, mais vous ne pouvez pas modifier le paramètre Durée avant pas suivant.
- Nb images/pas, En suspension
- Interpoler
-
Permet de contrôler l'accélération ou la décélération de la série de pas. Lorsque cette case est cochée, un second groupe de paramètres est activé sous Dernier pas.
Bipède crée les pas en utilisant en premier lieu les valeurs des paramètres définis sous Premier pas et en dernier lieu celles des paramètres définis sous Dernier pas.
Par interpolation entre les deux groupes de paramètres, Bipède génère une série de pas qui varie dans le temps.
Si la case Interpoler n'est pas cochée, les paramètres situés sous Dernier pas sont grisés. Bipède crée alors tous les pas en utilisant uniquement les paramètres définis sous Premier pas.
- Commencer après le dernier pas Ajoute les pas nouvellement créés à la fin de la séquence de pas existante.
- Commencer à l'image actuelle Insère les pas créés dans l'image actuelle afin d'introduire un intervalle de temps avant la reprise des pas.
Zones Premier pas et Dernier pas
- Longueur enjambée param.
- Définit, pour les nouveaux pas, la longueur d'enjambée sous forme de pourcentage de la longueur de la jambe du bipède. La valeur par défaut de 1.5 donne l'enjambée de course standard.
Avec la valeur 1, la longueur d'enjambée est égale à celle de la jambe, ce qui produit de grandes foulées. Avec la valeur 0, le bipède court sur place. Avec une longueur d'enjambée négative, le bipède court à reculons.
Lorsqu'un bipède court à reculons, non seulement le sens de son déplacement est inversé, mais le contact naturel du pied avec le sol est maintenu, la pointe touchant le sol en premier, suivie du talon.
Lorsque vous modifiez la valeur du paramètre Longueur enjambée param., vous modifiez automatiquement celle du paramètre Longueur enjambée réelle.
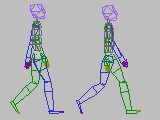
Longueur enjambée = 0,75 et Longueur enjambée = 1
- Longueur enjambée réelle
- Définit la longueur d'enjambée, pour les nouveaux pas, en unités 3ds Max.
Ce paramètre obéit aux mêmes règles que le paramètre Longueur enjambée param. décrit précédemment.
Lorsque vous modifiez la valeur du paramètre Longueur enjambée réelle, vous modifiez automatiquement celle du paramètre Longueur enjambée param.
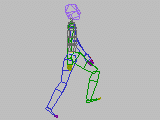
Hauteur enjambée = 5 unités
- Hauteur enjambée réelle
- Définit l'écart en hauteur entre deux pas. Ce paramètre permet de simuler la montée ou la descente d'une côte ou d'un escalier.
Il représente la différence de hauteur (en unités) entre deux pas consécutifs. Les valeurs positives créent une montée et les valeurs négatives une descente.
- Durée avant pas suivant
- Indique le nombre d'images dans chaque cycle d'animation d'un pied. Un cycle débute à l'image où un pied donné touche le sol, se poursuit avec l'élévation et le déplacement du pied, et se termine à l'image qui précède immédiatement la réception au sol. Ce paramètre n'est actif que si la case Synchro auto est cochée.
- Vitesse
- Indique de combien d'unités le bipède se déplace par image. La valeur de ce paramètre change en fonction des modifications apportées aux autres paramètres, mais ne peut pas être modifiée directement.
Les deux paramètres suivants ne sont actifs que si la case Synchro auto n'est pas cochée. Vous pouvez les utiliser à la place de Synchro auto pour contrôler la vitesse de l'avance du bipède tout au long de la série de pas.
- Nb images/pas
- Indique le nombre d'images pendant lesquelles chaque pied restera au sol pendant la course.
Plus ce nombre est élevé, plus le pied reste longtemps en contact avec le sol et, par conséquent, plus le mouvement est lent.
Les pas 2 et 3 sont sur le sol pendant 5 images chacun.
- En suspension
- Indique le nombre d'images où le corps est suspendu dans les airs pendant la course.
Plus ce nombre est élevé, plus le bipède reste longtemps en suspension et, par conséquent, plus le mouvement est lent.