C'est un exemple un peu plus complexe que l'exemple d'évitement de collision basique. Un parcours d'outil Z constant est utilisé sur le modèle bucket.dgk dans le dossier Exemples. Le parcours d'outil est limité à l'intérieur du seau.
- Cliquez sur l'onglet Edition de parcours d'outil > panneau Editer > Axe outil pour afficher la boîte de dialogue Axe outil. Dans l'onglet Définition:
- sélectionnez un axe d'outil de type vertical.
- sélectionnez Evitement de collisions auto..
- Sur l'onglet Evitement de collision, définir ce qui suit:
- Inclinaison de l'axe d'outil — Transversal
- Garde du corps d'outil — 1.0
- Garde de porte-outil — 3.0
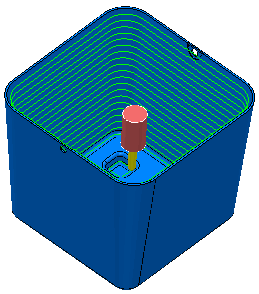
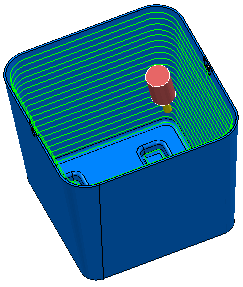
- Créer un parcours d'outil en Z constant, l'outil démarre à la verticale.
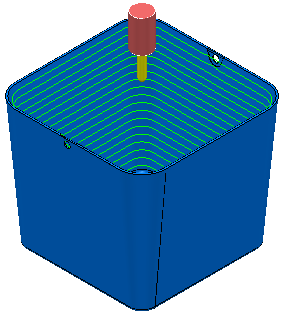
Puis, un angle transversal est appliqué afin que le porte-outil dégage juste le modèle.
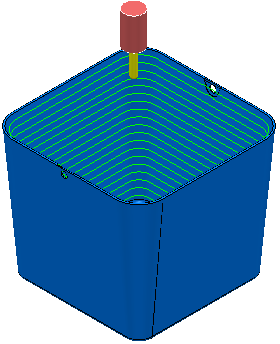
Au fur et à mesure que le parcours d'outil descend sur le modèle, l'angle transversal change afin que le porte-outil dégage juste le modèle:
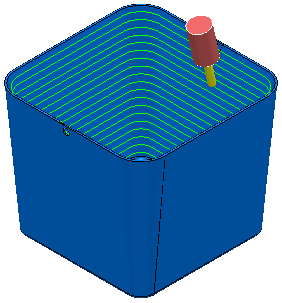
Et ainsi de suite en descendant sur le modèle: