パス追跡動作では、群集のシミュレーションで、代理オブジェクトの方向を指定し、特定のパスを通るようにできます。代理オブジェクトはパスに沿って前後に移動します。終端に来た場合には、最初にループ バックさせたり方向を逆にしたり、同じ方向を維持することもできます。
-
 [作成](Create)パネル >
[作成](Create)パネル >  ([ヘルパー](Helpers)) > [オブジェクト タイプ](Object Type)ロールアウト > [群集](Crowd) > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > [新規作成](New)ボタンをクリック > [動作タイプを選択](Select Behavior Type)ダイアログ ボックス > [パス追跡動作](Path Follow Behavior)
([ヘルパー](Helpers)) > [オブジェクト タイプ](Object Type)ロールアウト > [群集](Crowd) > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > [新規作成](New)ボタンをクリック > [動作タイプを選択](Select Behavior Type)ダイアログ ボックス > [パス追跡動作](Path Follow Behavior)
-
群集オブジェクトを選択 >
 [修正](Modify)パネル > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > [新規作成](New)ボタンをクリック > [動作タイプを選択](Select Behavior Type)ダイアログ ボックス > [パス追跡動作](Path Follow Behavior)
[修正](Modify)パネル > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > [新規作成](New)ボタンをクリック > [動作タイプを選択](Select Behavior Type)ダイアログ ボックス > [パス追跡動作](Path Follow Behavior)
-
群集オブジェクトを選択 > [修正](Modify)パネル > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > ドロップダウン リストから[パス追跡](Path Follow)を選択
シミュレーションの開始時に、代理オブジェクトの開始位置がパス上にない場合は、パスに従わせる前にパスへ移動します。計算時に、character studio は断続的にオプションのターゲット アイコンを表示し、代理オブジェクトの直近の目標を示します。これは、シミュレーションが進行するにつれて変化します。
インタフェース
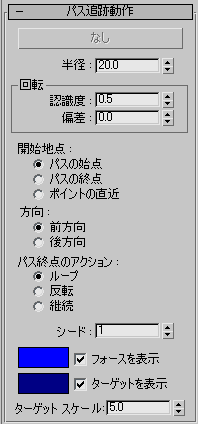
- [パス オブジェクト ボタン]
- このボタンをクリックしてから、パス オブジェクトを選択します。適切なパス オブジェクトには、スプラインや NURBS カーブが含まれます。パス オブジェクトに複数のスプラインまたはカーブが含まれる場合、character studio では最小番号の要素(通常は最初に作成された要素)が使われます。パスを選択する前のラベルは[なし](None)になっています。 注: パス オブジェクトの割り当ては、[修正](Modify)パネルでのみ実行できます。
- 半径
- 代理オブジェクトがパスを移動している間にとどまる場所を、パスからの放射状の距離(単位内)で示したもの。既定値は 20.0 で、範囲は 0.0 ~ 9,999,999.0 です。
[回転](Turning)領域
以下のパラメータにより、パスを追跡するときの代理オブジェクトの回転方法が決定されます。認識度は、代理オブジェクトの移動につれてどれだけ適切にパス中の回転を予想するかを決定します。偏差の設定を伴う認識度に対して、ランダム変量を適用できます。
- 認識度
- 代理オブジェクトがどれだけインテリジェントにこのパスを移動するかを指定します。[認識度](Awareness)設定の値が大きいと、代理オブジェクトはパスの曲線を考慮しながら移動し、変化を予測しようとします。一方、[認識度](Awareness)設定の値が小さいと、代理オブジェクトはパスを離れるときにだけパスを認識します。既定値は 0.5 で、範囲は 0.0 ~ 1.0 です。 注: [偏差](Deviation)設定と[シード](Seed)設定を使って、認識の動作をランダムにすることができます。
- 偏差
- [認識度](Awareness)の最大変化量を指定します。 character studio では、[偏差](Deviation)設定の正の値と負の値の間の乱数が選択され、その値と[認識度](Awareness)の積が計算され、その結果が[認識度](Awareness)に加算されます。既定値は 0.0 です。範囲は 0.0 ~ 1.0 です。 注: [シード](Seed)値を変更することで、同じ[認識度](Awareness)設定と[偏差](Deviation)設定を使用するさまざまなパス追跡動作を使用することができます。
- 開始地点
- 代理オブジェクトがパスの追跡を開始する位置を決定します。既定値の選択は[パスの始点](Beginning of Path)です。
ヒント: 選択したスプライン パスの開始地点を表示するには、[修正](Modify)パネルを開いて任意のサブオブジェクト レベルをオンにします。開始地点は固有の標識で表されます。閉じたカーブを使用する場合、[選択](Selection)ロールアウト
 [表示](Display)領域 [頂点数を表示](Show Vertex Numbers)をオンにすることによって、[修正](Modify)パネルで任意のサブオブジェクト レベルで頂点の順序付けを見ることもできます。NURBS カーブの開始地点を見るには、[カーブ](Curve)サブオブジェクト レベルを選択します。開始地点は、小さな緑色の円で示されます。
[表示](Display)領域 [頂点数を表示](Show Vertex Numbers)をオンにすることによって、[修正](Modify)パネルで任意のサブオブジェクト レベルで頂点の順序付けを見ることもできます。NURBS カーブの開始地点を見るには、[カーブ](Curve)サブオブジェクト レベルを選択します。開始地点は、小さな緑色の円で示されます。 - [パスの開始](Beginning of Path)代理オブジェクトは、パスを追跡する前にまずパスの始点に移動します。
- パスの終点代理オブジェクトは、パスを追跡する前にまずパスの終点に移動します。 閉じたカーブの場合、これはパスの始点と同じです。
- ポイントの直近代理オブジェクトは、まずパス上の最も近いポイントに移動し、その後そこからパスの追跡を開始します。
- 方向
-
パスを追跡する際に、代理オブジェクトが最初に取る方向を決定します。既定値の選択は[前方向](Forwards)です。
- 前方向代理オブジェクトはパス頂点に沿って昇順に移動します。
- 後方向代理オブジェクトはパス頂点に沿って降順に移動します。
- パス終点のアクション
-
パス終点に到達したときに代理オブジェクトが実行することを決定します。既定値の選択は[ループ](Loop)です。
- [ループ](Loop)代理オブジェクトは、パスが閉じていない場合でも、パスをループします。 [パスの始点](Beginning of Path)または[パスの終点](End of Path)を選択すると、代理オブジェクトはパスの移動を終了するたびにパスの開始位置または終了位置に戻ります。[ポイントの直近](Nearest Point)(Nearest Point)を選択すると、代理オブジェクトはその位置とパスの形状によって決定される任意の点に戻ります。
- [反転](Reverse)代理オブジェクトは、パスの終点で方向を反転します。 このオプションは、前後にパトロールする動作をシミュレートする場合に使用します。
- [続行](Continue)代理オブジェクトは、シミュレーションが終了するか、別のフォースまたは動作が作用するまで、パスの終点で向いていた方向への移動を継続します。
- シード
- 認識度をランダムにするためのシード値を指定します。既定値は 1 です。
- フォース ベクトル カラー見本
- 計算中に、[パス追跡](Path Follow)の力ベクトルを描画するために使用されるカラーが表示されます。ボックスをクリックすると、別の色を選択できます。既定値は青色です。
フォースを表示このチェック ボックスにチェックマークが付いている場合、パス追跡の動作によって代理オブジェクトに作用するフォースが、シミュレーション計算中にビューポートにベクトルとして描画されます。 既定値ではチェックマークが付いています。
- ターゲット アイコン カラー見本
-
ターゲット アイコンを描くためのカラーを表示します。既定値は濃い青色です。
ターゲットを表示ターゲット アイコンが表示できるようになります。これは、計算中に新たに代理オブジェクトの仮の目標が計算されたときに表示されます。 既定値ではチェックマークが付いています。
- ターゲット スケール
- ターゲット アイコン全体のサイズを指定します。既定値は 5.0 です。